Engineering Information 06.2005
6SE7087-6QX70 (Version AE) Siemens AG
11-6 Compendium Motion Control SIMOVERT MASTERDRIVES
m
D
v, a
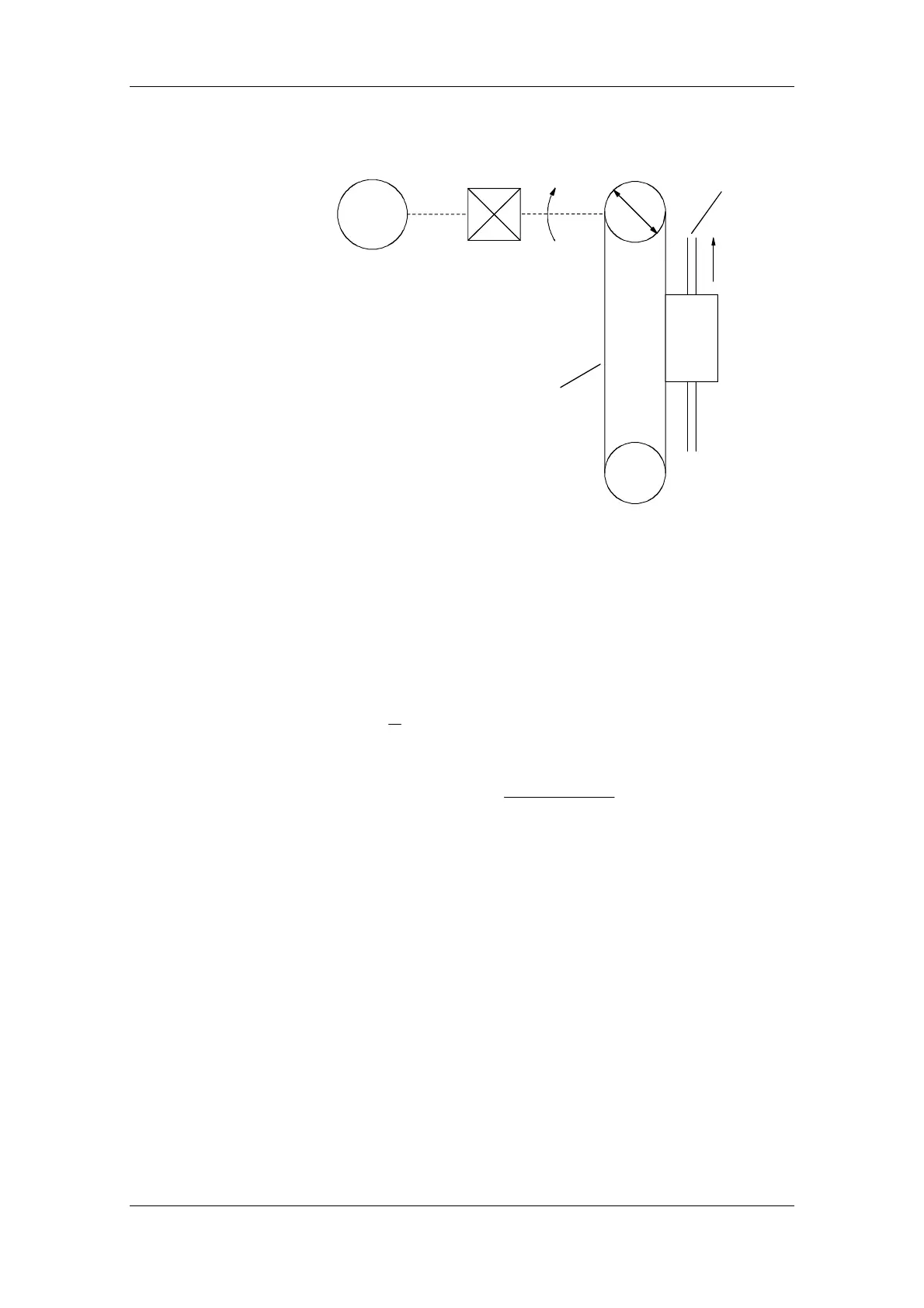
Guide
Toothed belt
Motor
Gear
M
n
Load
Load
Fig. 11-3 Lifting drive
♦
nJM
load b v load load b v load
,,,
,,
α
See "Horizontal travel drive"
♦ Lifting force [N]
Fmg
H
=⋅
♦ Lifting torque [Nm]
MF
D
HH
=⋅
2
♦ Lifting torque at the drive wheel/pinion [Nm]
MMM
load up b v load H
mech
Sign M M
bvload H
=+⋅
+
()
,
()
,
1
η
MMM
Load down b v load H
mech
Sign M M
bvload H
=+⋅
+
()
,
()
,
η
η
mech
Mech. efficiency of the lifting drive
M
b v load,
has to be applied with the correct sign (acceleration up,
deceleration down = + , deceleration up, acceleration
down = - )
If the deceleration is equal to the acceleration, the load torque is at a
maximum during the upwards acceleration phase.
Lifting drive
 Loading...
Loading...









