06.2005 Engineering Information
Siemens AG 6SE7087-6QX70 (Version AE)
SIMOVERT MASTERDRIVES Compendium Motion Control 11-31
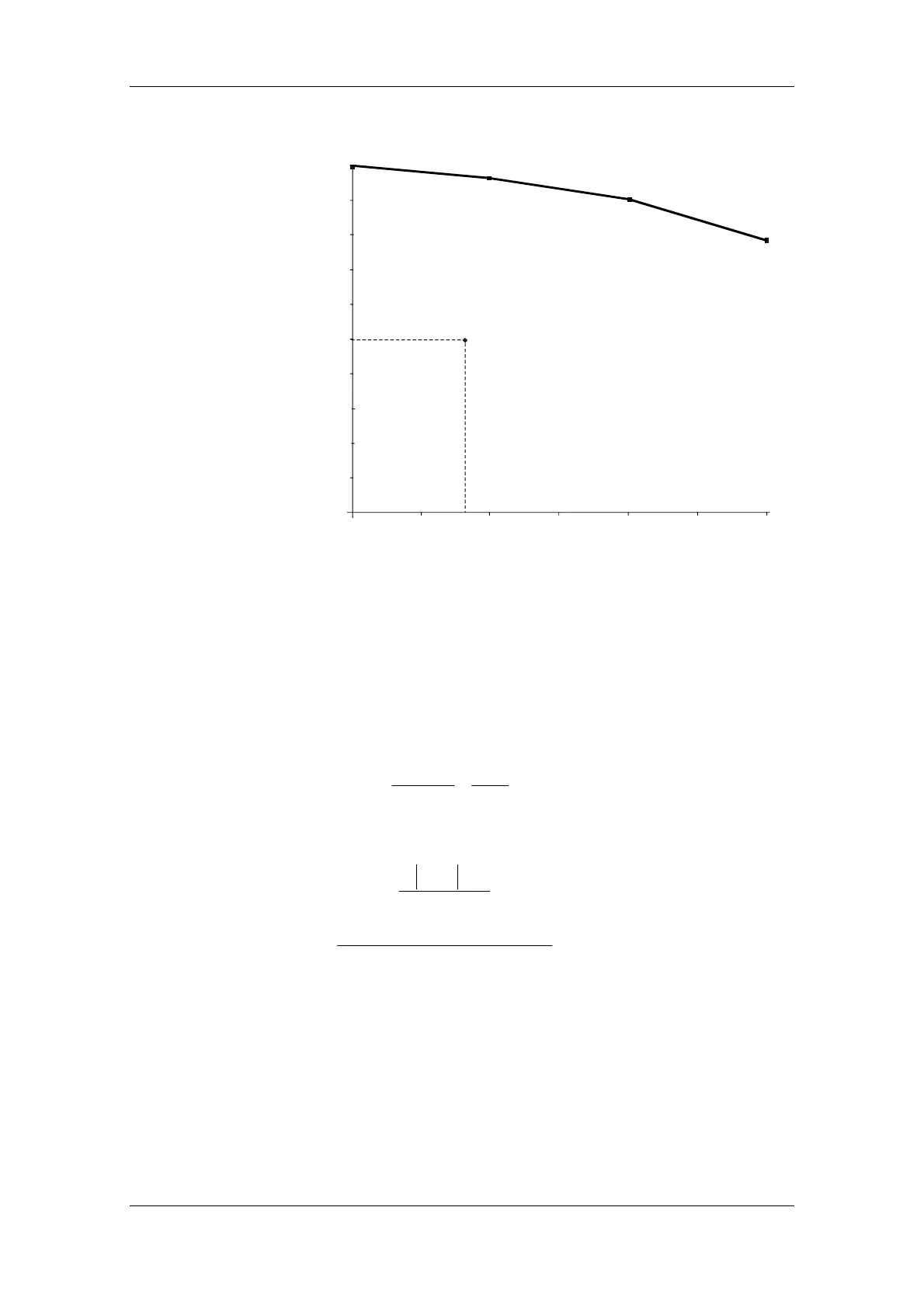
M/Nm
M
eff
n/min
-1
n
mean
12
10
8
6
4
2
0
1000 2000 30001500 2500
500
14
16
18
20
Fig. 11-16 S1 curve for the 1FT6084-8AF
The effective motor torque calculated is n
mean
below the S1 curve. The
motor is therefore suitable.
The inverter is selected according to the maximum motor current and
the mean value of the motor current.
♦ Maximum motor current (the saturation influence can be neglected
here)
I
M
k
A
Mot
Mot
Tn
max
max
.
.
.≈==
100
3103
134
2316
♦ Mean value of the motor current obtained from the magnitude of the
torque characteristic
I
Mt
kT
Mot mean
Mot i i
Tn
≈
⋅
⋅′
∑
∆
100
=
⋅+⋅+ ⋅
⋅
=
3103 0 25 321 1 1983 0 25
134 35
34
.. . ..
..
.A
Because the accelerating and decelerating times are ≤ 0.25 s and
the time between is ≥ 0.75 s, a check is now made to see if three-
times the rated current of a Compact PLUS inverter can be utilized
when I
Un
=10.2 A.
5. Selection of the
inverter
 Loading...
Loading...









