422
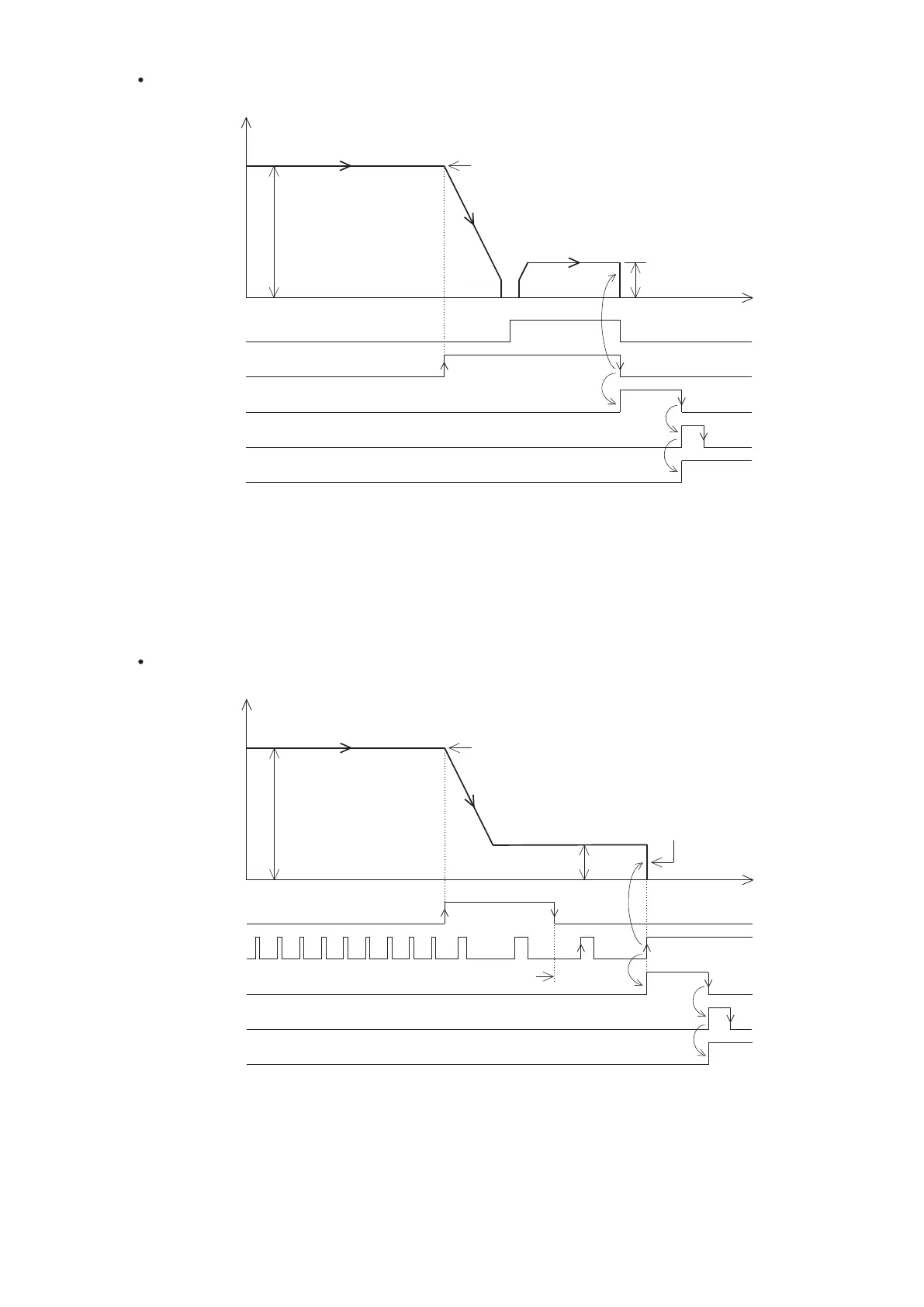
DOG Front End home positioning
DOG Forward, OFF → ON DOG Backward, ON → OFF
Direction signal
to the motor
DOG Rear End with PG0 count home positioning
The DOG signal may use a X or M. Usually assigned to the X0~X7, because the interrupt
input point can have the instant response.
Should avoid the DOG's Rear End signal to be too close to the PG0's Front End signal, that
may cause the PG0 counting error.
For the PG0 signal input, must use X0~X7. The PLC processes the counting by the way of
interrupt.
The CLR signal output can assign to a Y or M, the width of that “ON” signal is ≥ 20ms.
1
2
The DOG signal may use a X or M. Usually assigned to the X0~X7, because by the interrupt input
point can have the precise home position. On the other hand, if the signal for the DOG is not from
X0~X7, the home position after the return will have some inaccurate error.
The CLR signal output can assign to a Y or M, the width of that “ON” signal is ≥ 20ms.
DOG Signal
CLR Signal
Speed
Direction of home positioning
DOG Front End, start to slow down
Home positioning speed
Positioning
completed ag
Home positioning
complete ag
Home positioning
creep speed
Time
Condition contact
“OFF”
Motor reversed (opposite to the
direction of home positioning)
Speed
Direction of home positioning
Home positioning speed
DOG Front End, start to slow down
Home positioning
creep speed
Time
Condition contact
“OFF”
Instantly stops when the PG0’s
counting set value is reached
DOG Signal
CLR Signal
PG0 Signal
Positioning
completed ag
Home positioning
complete ag
Starts to count PG0 signals after DOG’s Rear End
is appeared. Set number of PG0 signals = 2.
 Loading...
Loading...