15.1 List of Parameters
15.1.2 List of Parameters
15-25
*1. Set a percentage of the rated motor torque.
*2. Normally set this parameter to 0. If you use an External Regenerative Resistor, set the capacity (W) of the Exter-
nal Regenerative Resistor.
*3. The upper limit is the maximum output capacity (W) of the SERVOPACK.
*4. These parameters are for SERVOPACKs with the Dynamic Brake Hardware Option. Refer to the following man-
ual for details.
Σ-7-Series Σ-7S/Σ-7W SERVOPACK with Dynamic Brake Hardware Option Specifications Product Manual
(Manual No.: SIEP S800001 73)
*5. The SGLFW2 is the only Yaskawa Linear Servomotor that supports this function.
*6. Enabled only when Pn61A is set to n.2 or n.3.
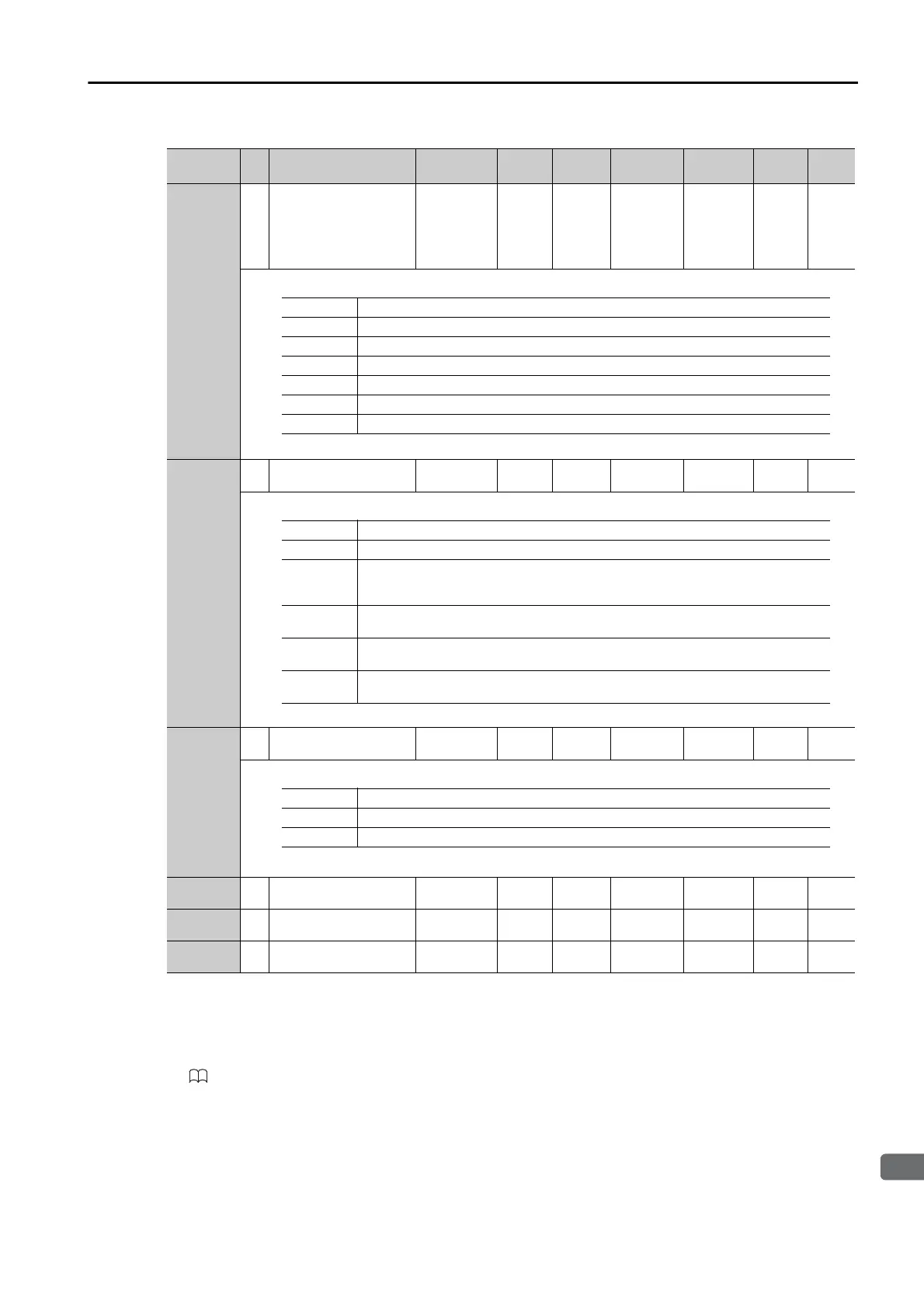
PnBA4
2 Input Signal Setting
0000h to
00A3h
−
00A3h All
Immedi-
ately
Setup
page
5-29,
page
6-34,
page
12-3
PnBA5
2 Action Definition Setting
0000h to
F800h
−
0040h All
After
restart
Setup
page
12-16
PnBA7
2 Initialization Setting
0000h to
0003h
−
0000h All
After
restart
Setup
page
12-17
PnBA9 4
Reserved parameter (Do
not change.)
0 to
1,000,000
−
10000
−−
Setup
−
PnBAA 4
Reserved parameter (Do
not change.)
15,625 to
2,047,968,750
−
4000000
−−
Setup
−
PnBAB 4
Reserved parameter (Do
not change.)
15,625 to
2,047,968,750
−
4000000
−−
Setup
−
Continued from previous page.
Parameter
No.
Size
Name
Setting
Range
Setting
Unit
Default
Setting
Applicable
Motors
When
Enabled
Classi-
fication
Refer-
ence
Bit 0 CCW-OT Signal (0 = Disable, 1 = Enable)
Bit 1 CW-OT Signal (0 = Disable, 1 = Enable)
Bits 2 to 4 Reserved.
Bit 5 EXSTOP Signal (0 = Disable, 1 = Enable)
Bit 6 Reserved.
Bit 7 /HOME Signal (0 = Disable, 1 = Enable)
Bits 8 to 15 Reserved.
Bits 0 to 10 Reserved.
Bit 11 Automatic Reset (0 = Do not execute, 1 = Execute)
Bit 12
Command Error Clearing Method (0 = Clear error when Valid Data in the command
message is 0, 1 = Automatically reset error when the data in the command mes-
sage is normal)
Bit 13
Main Circuit Power Supply Error Mask (0 = Detect main circuit power supply errors,
0 = Do not detect main circuit power supply errors)
Bit 14
Main Circuit/Control Power Alarm Clearing Method (0 = Use the alarm clear com-
mand, 1 = Automatically reset alarm when power is restored)
Bit 15
Positioning Command Method after Continuous Operation (0 = Use positioning
command, 1 = Use switching command)
Bit 0 Absolute Encoder Reset (0 = Execute, 1 = Do not execute)
Bit 1 Parameter Initialization (0 = Execute, 1 = Do not execute)
Bits 2 to 15 Reserved.
 Loading...
Loading...




