5.2 b: Application
136 YASKAWA ELECTRIC SIEP C710616 30B YASKAWA AC Drive T1000A Technical Manual
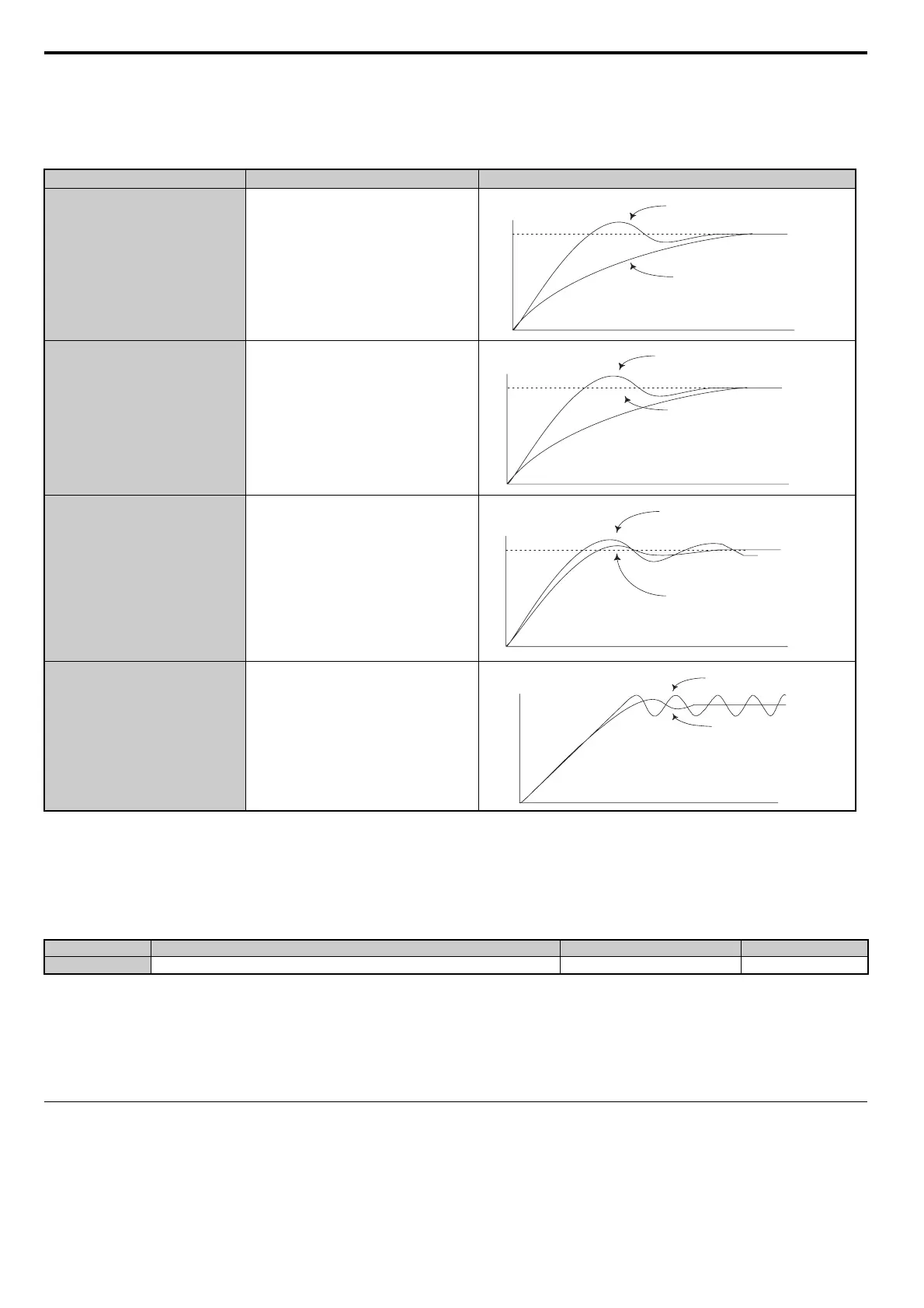
n Fine-Tuning PID
Once PID control parameters have been set, fine-tuning may be required. Follow the directions below.
Table 5.11 PID Fine Tuning
n b5-47: Reverse Operation Selection 2 by PID Output
Determines whether a negative PID output reverses the direction of drive operation. When the PID function is used to
trim the frequency reference (b5-01 = 3 or 4), this parameter has no effect and the PID output will not be limited (same as
b5-11 = 1).
Setting 0: Reverse Disabled
Negative PID output will be limited to 0 and the drive output will be stopped.
Setting 1: Reverse Enabled
Negative PID output will cause the drive to run in the opposite direction.
u b6: Dwell Function
The Dwell function is used to temporarily hold the frequency reference at a predefined value for a set time, then continue
accelerating or decelerating.
Goal Tuning Procedure Result
Overshoot must be suppressed
• Reduce the derivative time (b5-05)
• increase the integral time (b5-03)
Quickly achieve stability, and some
overshoot is permissible
• Decrease the integral time (b5-03)
• Increase the derivative time (b5-05)
Suppress long cycle oscillations (longer
than the integral time setting)
• Increase the integral time (b5-03)
Suppress short cycle oscillations
• If oscillation cycle time is close to the
derivative time, the derivative part is likely
having too much influence. Reduce the
derivative time (b5-05).
• If the derivative time is set to 0.00 s and
oscillations are still a problem, try reducing
the proportional gain (b5-02) or try
increasing the PID primary delay time (b5-
08)
No. Name Setting Range Default
b5-47 Reverse Operation Selection 2 by PID Output 0, 1 1
Response
Before adjustment
After adjustment
Time
Response
Before adjustment
After adjustment
Time
Response
Before adjustment
After adjustment
Time
Response
After adjustment
Before adjustment
Time