5.4 d: Reference Settings
158 YASKAWA ELECTRIC SIEP C710616 30B YASKAWA AC Drive T1000A Technical Manual
If a lower reference than this value is input, the drive will run at the d2-05 level. If the drive is started with a lower
reference than d2-05, it will accelerate up to d2-05.
u d5: Torque Control
Torque Control is available for CLV and CLV/PM (A1-02 = 3, 7). It allows to define a setpoint for the torque produced
by the motor.
n
Torque Control Operation
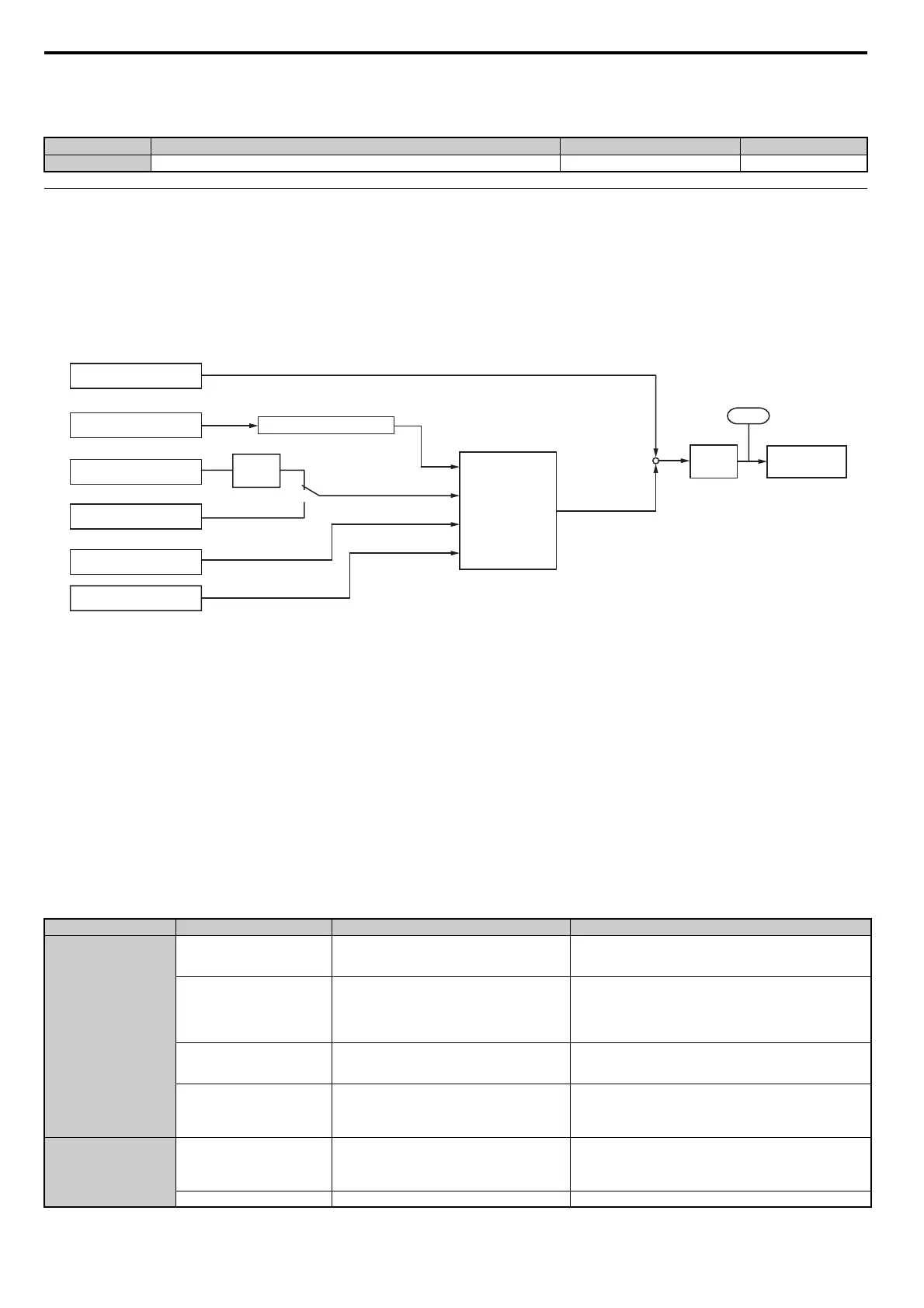
Torque control can be enabled either by setting parameter d5-01 to 1 or by a digital input (H1- = 71). Figure 5.41
illustrates the working principle.
Figure 5.41
Figure 5.41 Torque Control Block Diagram
The externally input torque reference is used as the target value for the motor output torque. If the motor torque reference
and the load torque are not in balance when in Torque Control, the motor accelerates or decelerates. An operation beyond
the speed limit is prevented by compensating the external torque reference value if the motor speed reaches the limit. The
compensation value is calculated using the speed limit, speed feedback, and the speed limit bias.
If an external torque compensation value is input, it is added to the speed limit compensated torque reference value. The
value calculated is limited by the L7- settings, and is then used as the internal torque reference, which can be
monitored in U1-09. The L7- settings have highest priority, i.e., the motor cannot be operated with a higher torque
than the L7- settings, even if the external torque reference value is increased.
n
Setting the Torque Reference, Speed Limit, and Torque Compensation Values
Torque Control Reference Sources
Input values for Torque Control can be set like explained in Table 5.17.
Table 5.17 Torque Control Input Value Selection
No. Parameter Name Setting Range Default
d2-05 Frequency Reference 2 Lower Limit 0.0 to 110.0% 0.0%
Input Value Signal Source Settings Remarks
Torque Reference
Analog inputs A1/A2/A3 H3-02, H3-10, or H3-06 = 13
<1>
Make sure the signal level settings for the input terminal selected
match the signal used. Refer to H3: Multi-Function Analog Inputs
on page 201 for details on adjusting analog input signals.
Analog Option Card
• F2-01 = 0
• H3-02, H3-10, or H3-06 = 13
<1>
The F3- settings become effective for the option board input
terminals. Make sure the signal level settings for the input terminal
selected match the signal used. Refer to H3: Multi-Function
Analog Inputs on page 201 for details on adjusting analog input
signals.
MEMOBUS Register 0004h
• b1-01 = 2
• Set Register 000Fh, Bit 2 = 1 to enable Torque
reference from register 0004h
–
Communication Option Card
• b1-01 = 3
• F6-06 = 1
Refer to the option card manual for details about
setting the torque reference value.
–
Speed Limit
Signal selected as frequency
reference source
d5-03 = 1
The speed limit is taken from the input selected as
frequency reference source in parameter b1-01 or b1-
15.
<1>
The settings in C1- for accel/decel times and in C2- for S-
curves are applied to the speed limit value.
Parameter d5-04 d5-03 = 2 –
Torque Compensation
External Torque Reference
External Speed Limit
Speed Limit set in d5-04
Speed Feedback
Speed Limit Bias d5-05
Soft
Starter
d5-03
1
2
C1- , C2-
Torque Reference Delay
d5-02
Torque
Limits
L7-
Internal Torque
Reference
+
Compensated torque
reference
d5-08
+
U1-09
Speed Limiter

 Loading...
Loading...










