Chapter 12 Description of Parameter Settings
MH300
Settings
Functions Descriptions
24 FWD JOG command
This function is valid when the source of the operation command
is external terminal. ON: the drive executes forward JOG. When
executing the JOG command in torque mode, the drive
automatically switches to speed mode. The drive returns to
torque mode after the JOG command is complete.
25 REV JOG command
This function is valid when the source of the operation command
is external terminal. ON: the drive executes reverse JOG. When
executing the JOG command in torque mode, the drive
automatically switches to speed mode. The drive returns to
torque mode after the JOG command is complete.
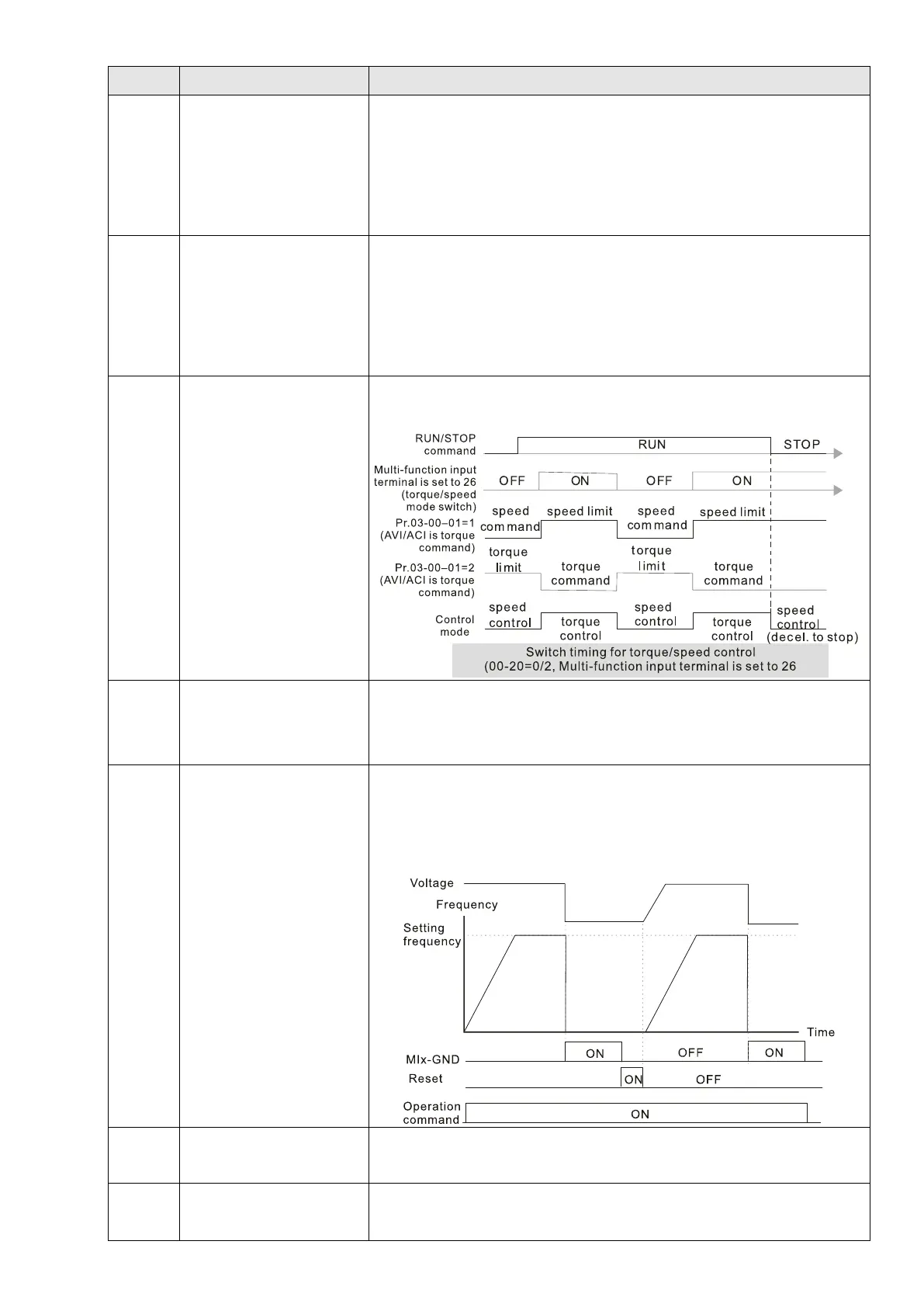
26
TQC / FOC mode
selection
ON: TQC mode.
OFF: FOC mode.
27 ASR1 / ASR2 selection
ON: the speed is adjusted by the ASR 2 setting.
OFF: the speed is adjusted by the ASR 1 setting.
Refer to Pr.11-02 for details.
28 Emergency stop (EF1)
ON: the output of the drive stops immediately, displays “EF1” on
the keypad, and the motor is in free run status. The drive keeps
running until the fault is cleared after you press RESET on the
keypad (EF: External Fault).
29
Signal confirmation for
Y-connection
When the control mode is V/F, ON: the drive operates by the first
V/F.
30
Signal confirmation for
∆-connection
When the control mode is V/F, ON: the drive operates by the
second V/F.

 Loading...
Loading...




