Chapter 12 Description of Parameter Settings
MH300
Settings
Functions Descriptions
42 Crane function
Use this function with Pr.02-34 and Pr.02-58.
Refer to Pr.02-34 and Pr.02-58 for details.
43
Motor actual speed
detection
Active when the actual motor speed is less than Pr.02-47.
44 Low current output Use this function with Pr.06-71–Pr.06-73.
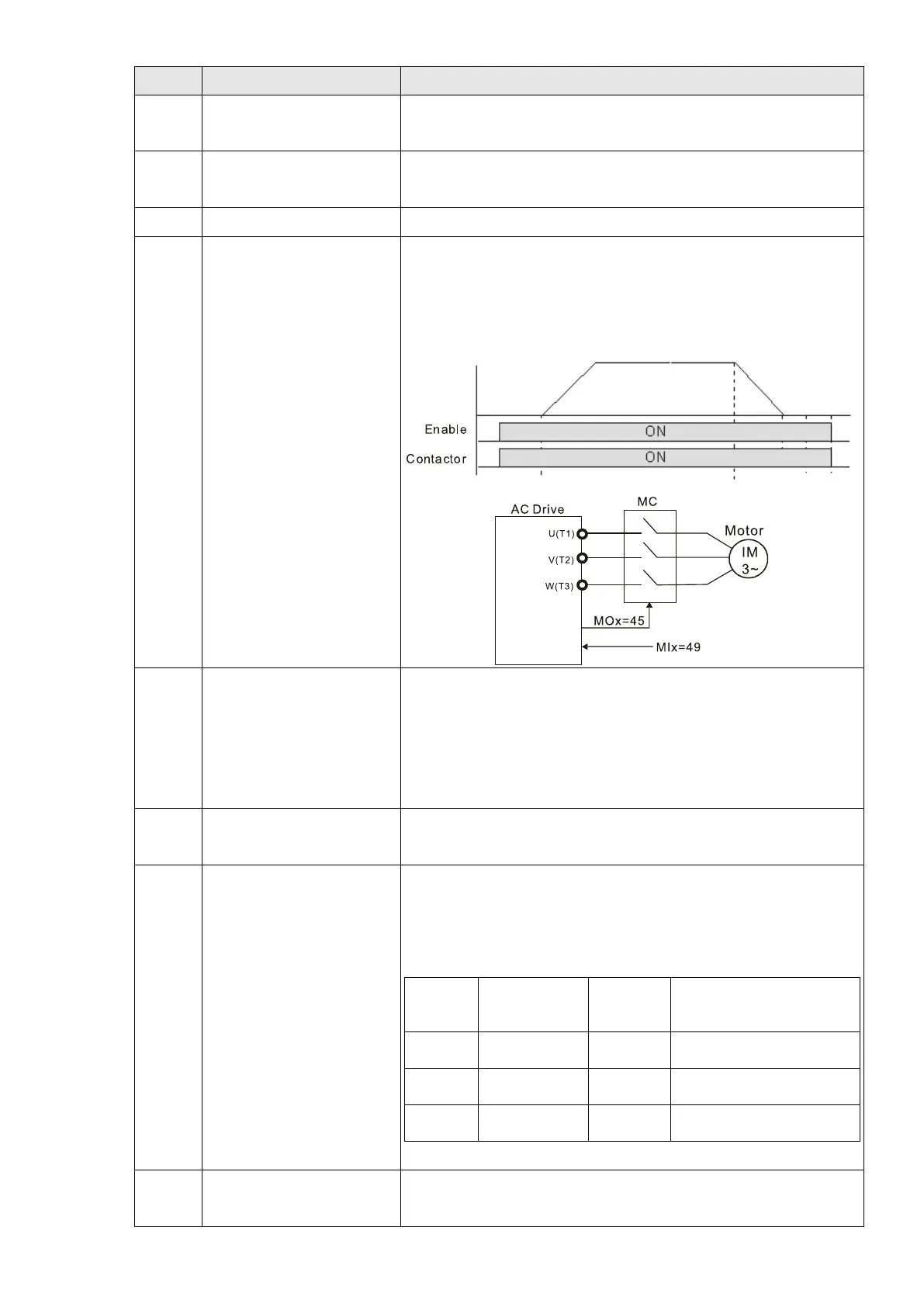
45
UVW output
electromagnetic valve
ON / OFF switch
Use this function with external terminal input = 49 (drive
enabled) and external terminal output = 45 (electromagnetic
valve enabled), and then the electromagnetic valve is ON or
OFF according to the status of the drive.
46
Outputs when master
dEb acts
When dEb rises at the master, MO sends a dEb signal to
the slave. Output the message when the master triggers
dEb. This ensures that the slave also triggers dEb. Then
slave follows the deceleration time of the master to stop
simultaneously with the master.
49
Homing action
completed
Activate when homing action is completed.
50
Output control for
CANopen
Control the multi-function output terminals through
CANopen.
The mapping table of the CANopen DO is shown in the
following table:
Physical
terminal
related
Attribute
Corresponding
index
RY1 Pr.02-13 = 50 RW
2026-41
bit 0 of initial value 0x01
MO1 Pr.02-16 = 50 RW
2026-41
bit 3 of initial value 0x01
MO2 Pr.02-17 = 50 RW
2026-41
bit 4 of initial value 0x01
Refer to subsection 15-3-5 for more information.
51
Output control for
RS-485
For RS-485 communication control output.

 Loading...
Loading...




