Chapter 12 Description of Parameter Settings
MH300
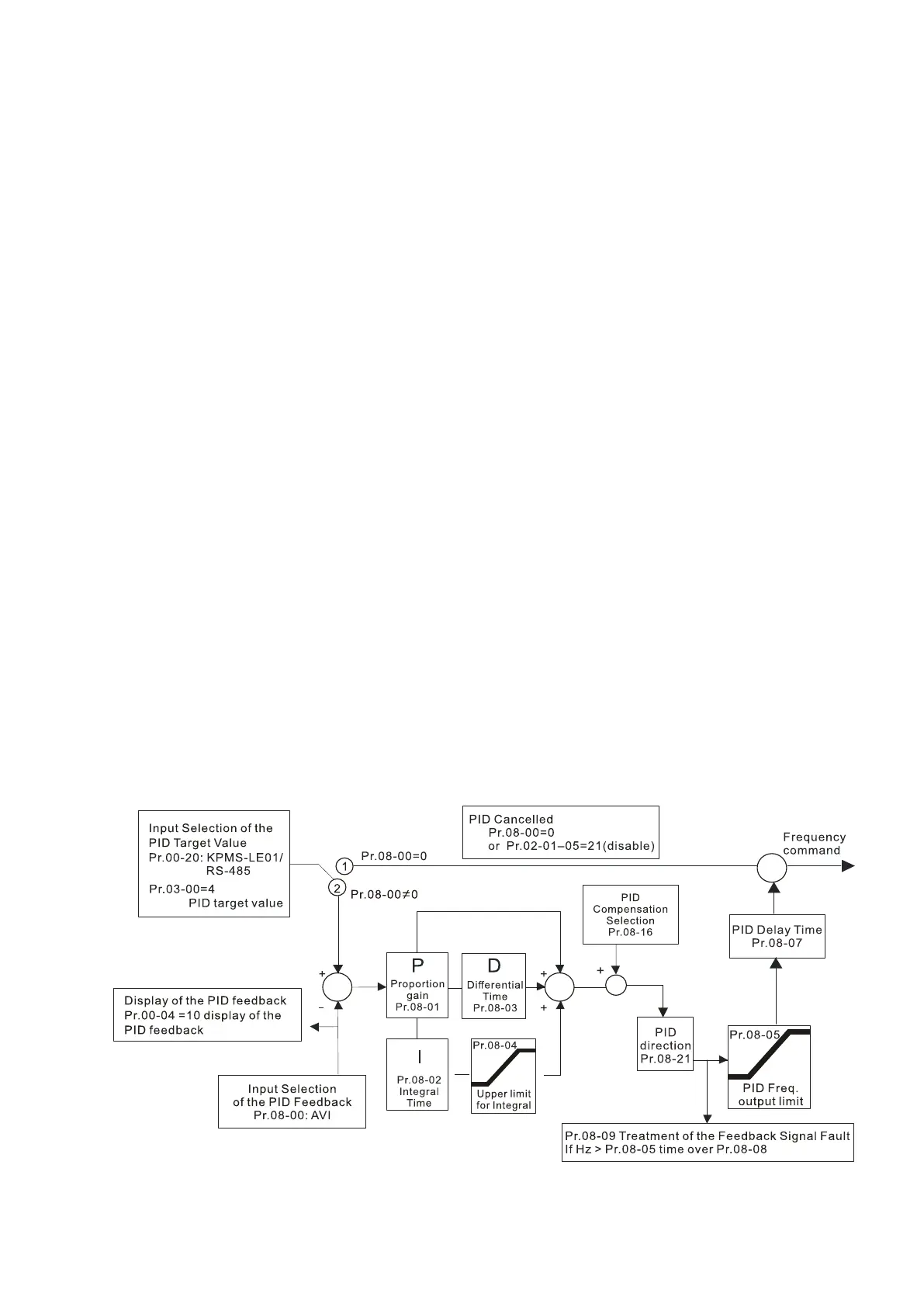
Pr.08-07 determines the primary low pass filter time when in PID control. Setting a large time
constant may slow down the drive’s response rate.
PID control output frequency is filtered with a primary low pass function. This function can filter a
mix of frequencies. A long primary low pass time means the filter degree is high and a short
primary low pass time means the filter degree is low.
Inappropriate delay time setting may cause system error.
PI Control:
Controlled only by the P action, so the deviation cannot be entirely eliminated. In general, to
eliminate residual deviations, use the P + I control. When you use the PI control, it eliminates the
deviation caused by the targeted value changes and the constant external interferences. However,
if the I action is too powerful, it delays the response when there is rapid variation. You can use the
P action by itself to control the loading system with the integral components.
PD Control:
When deviation occurs, the system immediately generates an operation load that is greater than
the load generated only by the D action to restrain the deviation increment. If the deviation is small,
the effectiveness of the P action decreases as well. The control objects include applications with
integral component loads, which are controlled by the P action only. Sometimes, if the integral
component is functioning, the whole system may vibrate. In this case, use the PD control to reduce
the P action’s vibration and stabilize the system. In other words, this control is useful with no brake
function’s loading over the processes.
PID Control:
Use the I action to eliminate the deviation and the D action to reduce vibration; then combine this
with the P action for the PID control. Use the PID method for a control process with no deviations,
high accuracy, and a stable system.
Serial connection

 Loading...
Loading...




