Chapter 12 Description of Parameter Settings
MH300
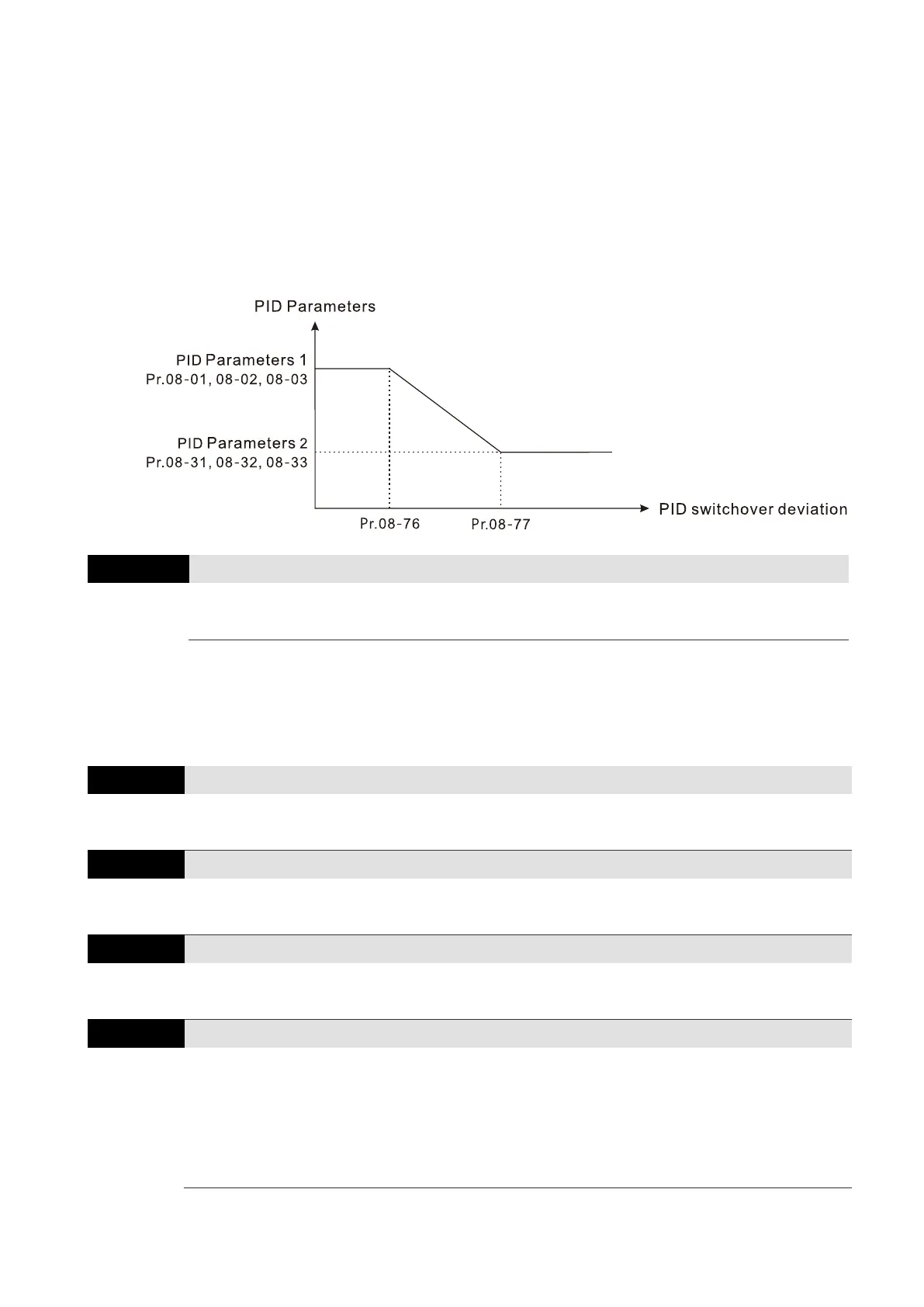
Switch according to the deviation:
When the deviation absolute value between the set point and feedback is smaller than
Pr.08-76 (PID2 Parameter Switch Deviation 1), the first group PID parameters are used.
When the deviation absolute value between the set point and feedback is larger than Pr.08-
77 (PID2 Parameter Switch Deviation 2), the second group PID parameters are used.
When the deviation absolute value between the set point and feedback is between Pr.08-
76 and Pr.08-77, the PID parameter is the linear interpolation value between the two PID
parameter groups.
Allowed reverse running time after start-up
Default: 0.0
Settings 0.0–6553.5 sec.
When Pr.08-78 is not set to 0, allowed reverse running time after start-up is enabled.
When it set to 1
second, the PID control is not allowed to change the running direction within 0–
1 seconds of starting time (Pr.08-21 = 0), and is allowed to change after 1 second of starting time
(Pr.08-21 = 1).
WireBreak detected upper level
Default: 0
Settings 0–100%
WireBreak detected lower level
Default: 0
Settings 0–100%
Default: 0.000
Settings 0.000–65.535 sec.
Default: 0
Settings 0: Warn and do not stop
1: ramp to stop
2: coast to stop
3: Warn, PID hold
Since the tension control may be activated during unwinding, there must be a mechanism to
determine the material cutoff after rewind.

 Loading...
Loading...




