Chapter 12 Description of Parameter Settings
MH300
Default: 115
Settings 0–120% (0: No function)
This parameter determines the maximum encoder feedback signal allowed before a fault
occurs. The maximum operation frequency for Pr.01-00 = 100%
Encoder Stall Detection Time
Default: 0.1
Settings 0.0–2.0 sec.
Default: 2
Settings 0: Warn and continue operation
1: Fault and ramp to stop
2: Fault and coast to stop
When the drive output frequency exceeds the encoder stall level (Pr.10-10), the drive starts to
count the time. When the error time exceeds the encoder stall detection time (Pr.10-11), the drive
implements the encoder stall treatment.
Default: 50
Settings 0–50% (0: No function)
Encoder Slip Detection Time
Default: 0.5
Settings 0.0–10.0 sec
Encoder Stall and Slip Error Action
Default: 2
Settings 0: Warn and continue operation
1: Fault and ramp to stop
2: Fault and coast to stop
This parameter acts on the settings for Pr.10-13–Pr.10-15:
When the value of (rotation speed – motor frequency) exceeds the Pr.10-13 setting, and the
detection time exceeds Pr.10-14; the drive starts to count the time. If the detection time exceeds
Pr.10-14, the encoder feedback signal error occurs.
Default: 0
Settings 0: Disable
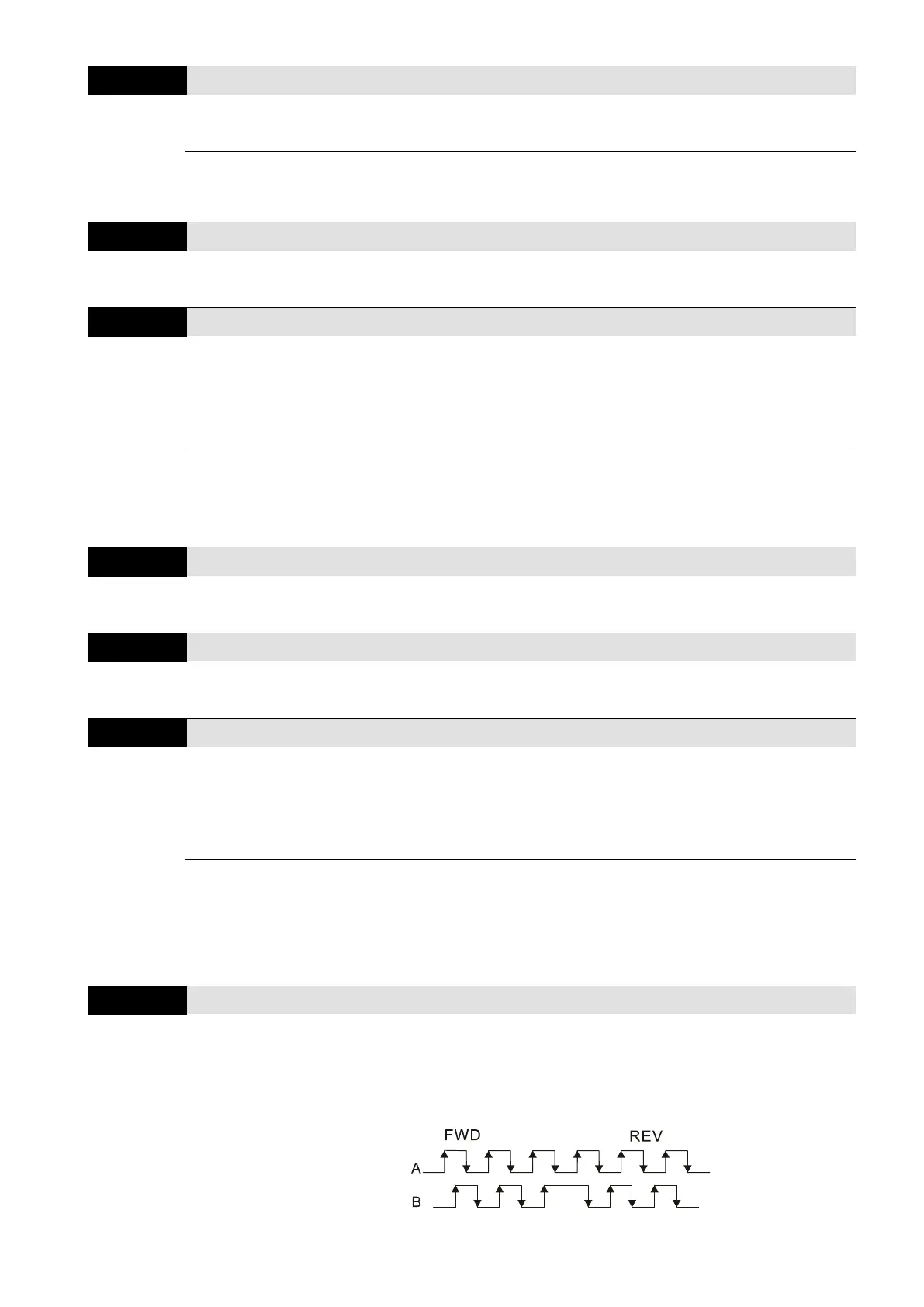
1: Phases A and B are pulse inputs, forward direction if A-phase leads B-
phase by 90 degrees.

 Loading...
Loading...




