Chapter 12 Description of Parameter Settings
MH300
Default: 30
Settings 0–200%
This parameter is invalid when Pr.05-24 = 1.
This parameter is valid only when Pr.11-00 bit0 = 1.
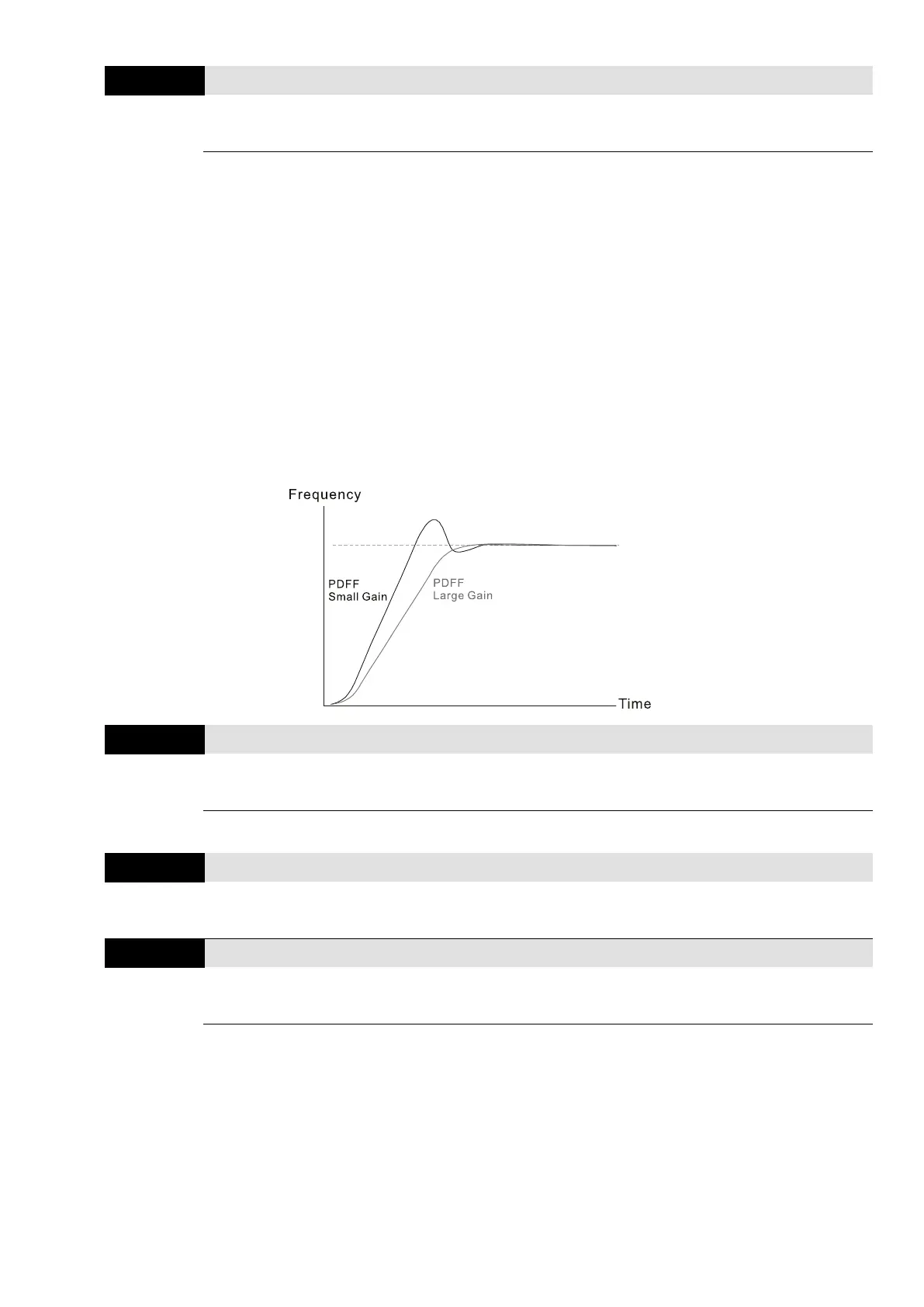
After you estimate and set Pr.11-00 bit0=1 (auto-tuning), use Pr.11-13 to reduce overshoot.
However, a shift of the curve may occur earlier. In this case, you can set Pr.11-13 = 0 first, and
then increase the setting value to "a condition with best acceleration and without overshoot" when
the acceleration time meets your application but overshoot occurs.
Increasing Pr.11-13 improves the overshoot of speed tracking, but an excessive value may reduce
the transient response.
Increasing Pr.11-13 enhances the system stiffness in high-speed steady state, and reduce the
speed transient fluctuation at a sudden loading.
Ensure that you set Pr.11-01 system inertia correctly to get excellent improvement of the speed
response.
ASR Output Low-pass Filter Time
Default: 0.008
Settings 0.000–0.350 sec.
Sets the ASR command filter time.
Default: 0
Settings 0–20 dB
Default: 0.0
Settings 0.00–200.00 Hz
Sets the resonance frequency of the mechanical system. Adjust it to a smaller value to suppress
the mechanical system resonance.
A larger value improves resonance suppression function.
The notch filter frequency is the mechanical frequency resonance.

 Loading...
Loading...




