Chapter 12 Description of Parameter Settings
MH300
This parameter smooths the position command for single-point positioning and point-to-point
positioning control mode, especially the application for the operation of mechanical structure.
When the load inertia increases, the inertia of motor generated during the stop also increases,
further worsens the smoothness of the operation. In this case, increase Pr.11-50 to the elevate
smoothness.
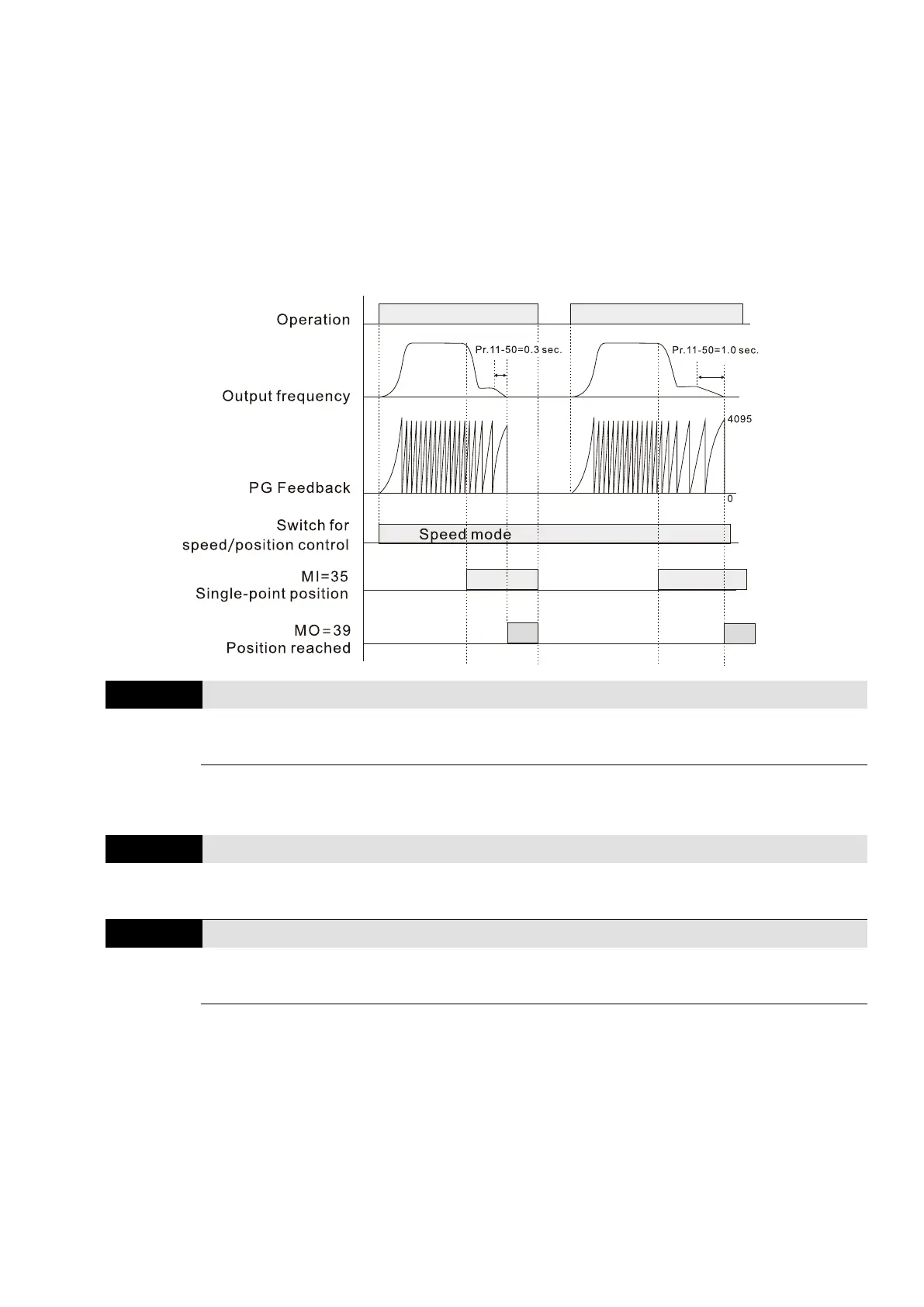
If the multi-function input terminal MIx = 35 (enable single-point positioning) is enabled under the
speed mode, the drive executes single-point positioning according to Pr.11-50 setting. Refer to
the diagram below when Pr.11-50 is set to 1 and 0.3 second respectively.
Maximum Allowable Position Error
Default: 1000
Settings 0–65535
Define the maximum error between the allowed position command and the actual position
feedback when the drive is in the position control mode.
Allowable Position Error Range
Default: 10
Settings 0–65535 pulse
Allowable Position Error Cumulative Time
Default: 0.500
Settings 0.000–65.535 sec.
When the position error is smaller than or equal to the allowed position error tolerance, and
exceeds Pr.11-53 setting time, MOx = 39 (position reached) outputs.
If the position error is larger than the allowed position error tolerance, the drive waits until the
position error is smaller than or equal to the allowed tolerance and until Pr.11-53 setting time
arrives, MOx = 39 outputs.

 Loading...
Loading...




