Part 2: Maintenance 5. Replacing the Motors
125
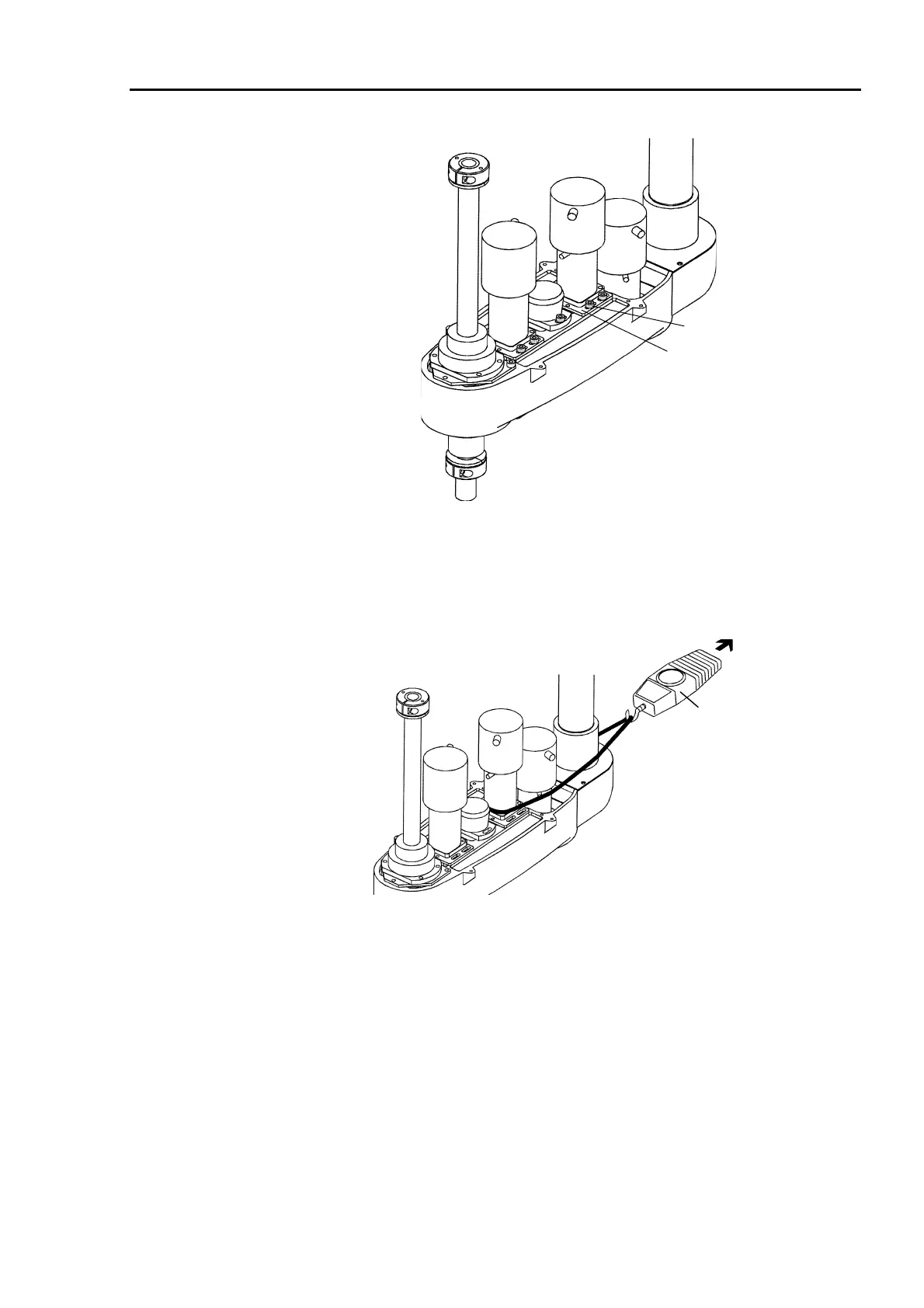
(5) Fasten the Joint #4 motor plate roughly for the time being with four bolts (M4
×
10).
4-M4
×
10
Joint #4 motor plate
(6) Pass a cord or string near the Joint #4 motor plate. Loosen the bolts for the Joint #4
motor plate fastened in the step (5) and pull the string using a force gauge or similar
tool. Fasten the Joint #4 motor plate securely where the U1 belt is pulled at 49N
(5kgf). Adjust in the range of 29N - 68N (3kgf - 7kgf).
Force gauge
(7) Connect the connectors, X141 and X41.
(8) Fasten the motor cables with wire ties in their original positions. Do not allow
unnecessary strain on to the cables.
(9) Install the arm top cover and arm bottom cover. (Refer to chapter 2. Opening the
Covers.)
* If the manipulator is a Protected model, seal the arm top cover and arm bottom cover.
Refer to the section Sealing the Manipulator in chapter 13. Protected Model
Maintenance.
(10) The mechanical origin position and teach points change when the motor is replaced.
Be sure to calibrate Joint #4. (Refer to chapter 11. Calibration.)
 Loading...
Loading...









