IS810N-INT Series Servo System User Manual (Brief) Appendix 1 List of Object Groups
- 274 -
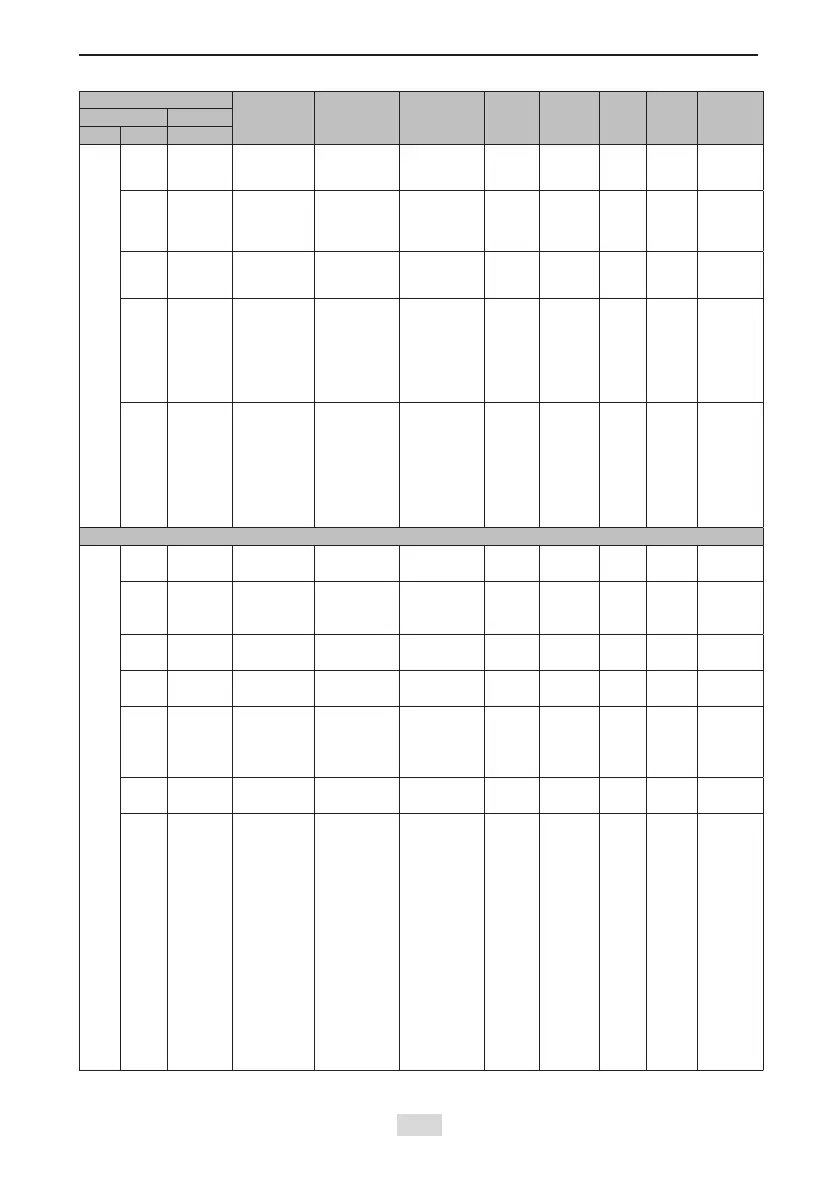
Parameter group
Name
Option
Description
Setting Range Default Min. Unit Width
Change
method
Effective
Way
Hexadecimal Decimal
Group Index Parameter
2007
14h H07-19
Internal speed
limit value for
torque control
- 0 to 6000 3000 1 RPM 16 bits
During
running
Immediate
15h H07-20
Internal speed
negative
limit value in
torque control
- 0 to 6000 3000 1 RPM 16 bits
During
running
Immediate
16h H07-21
Base value
for torque
reached
- 0 to 3000 0 0.1% 16 bits
During
running
Immediate
17h H07-22
Torque value
outputted
when the
torque
reached DO
signal is
turned on,
- 0 to 3000 200 0.1% 16 bits
During
running
Immediate
18h H07-23
Torque value
outputted
when the
torque
reached DO
signal is
turned off
- 0 to 3000 100 0.1% 16 bits
During
running
Immediate
2008h/H08 Gain Parameters
2008
01h H08-00
Speed loop
gain
- 1 to 20000 250 0.1 Hz 16 bits
During
running
Immediate
02h H08-01
Time constant
of speed loop
integration
- 15 to 51200 3183 0.01 ms 16 bits
During
running
Immediate
03h H08-02
Position loop
gain
- 0 to 20000 400 0.1 Hz 16 bits
During
running
Immediate
04h H08-03
2nd gain of
speed loop
- 1 to 20000 400 0.1 Hz 16 bits
During
running
Immediate
05h H08-04
2nd time
constant of
speed loop
integration
- 15 to 51200 2000 0.01 ms 16 bits
During
running
Immediate
06h H08-05
2nd gain of
position loop
- 0 to 20000 640 0.1 Hz 16 bits
During
running
Immediate
09h H08-08
2nd gain
mode setting
0: The 1st
gain is xed
and the P/
PI switchover
is performed
using bit 26 of
60FE.
1: The 1st
and 2nd gain
switchovers
are valid, and
the switchover
condition is
H0809.
0 to 1 1 1 16 bits
During
running
Immediate
 Loading...
Loading...