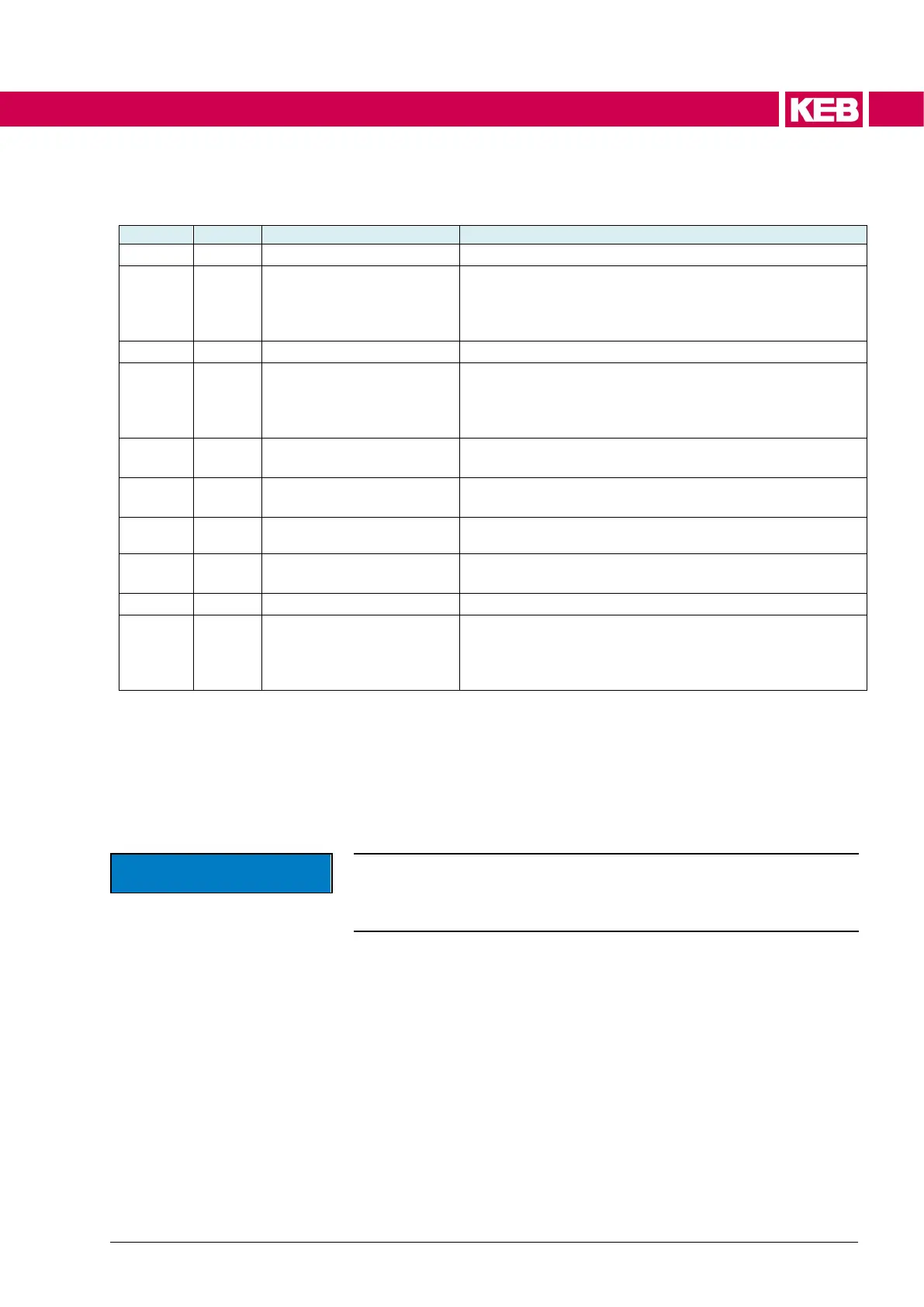
6.2.3.6 Rotor position detection in operation at SCL (hf injection)
Off/on of rotor position detection by HF injection
Frequency of the test signal.
The switching frequency should be at least 8 times
higher than the test signal frequency. For noise reasons,
other test signal frequencies are also possible.
hf inj. optimization factor
Hardness of the PI controller
A voltage amplitude is calculated from the motor data,
which shall offer a current of 10% of the rated current.
The amplitude can be lowered or increased via this fac-
tor.
hf inj. speed ctrl. red. fac-
tor
Defines the reduction of the speed controller parameters
(kp, ki) as long as the HF injection is active
Pt1 filter time
The filter time is automatically calculated at dd26 = -1
hf inj. angle precontrol
mode
Off/on of the angular advance under load
hf inj. angle prec. factor
[°@ InMot]
Describes how many degrees the angle advances at ac-
tive current = rated current
Pt1 time for tracking of the hf speed
hf inj. diff rho current
res.[°]
Error angle, due to the current resolution of the used in-
verter. The value corresponds to the error angle, which
is caused by noise with the amplitude of one bit. It
should be below 2°.
The HF injection allows the detection of the rotor position during running operation
at low output frequencies in SCL operation.
A voltage with high frequency (dd22) is modulated for this. A difference between
the inductance in the q and d-axis (Lq> Ld) of the motor is necessary in order to
detect the rotor position. The difference is depending on the construction of the
motor.
➢ Important: the information content may not be lost under load (e.g. by
saturation). An operation with sine-wave filter is not possible par-
allel to this function.
The speed range wherein the function is active, is defined by parameters
ds36/ds37 (min/max speed for stab current). The RF signal is switched off above
this range and system position and speed are estimated by the motor model. The
speed estimated by the HF controller is usually very noisy and must be additionally
filtered by a PT1 element (dd29).
With pronounced IPM characteristics of the motor (Lq>>Ld) it is reasonable to
switch off the stabilisation current and the stabilisation term (ds30).
The stator resistance adaptation is internally deactivated with activation of the HF
injection.
 Loading...
Loading...











