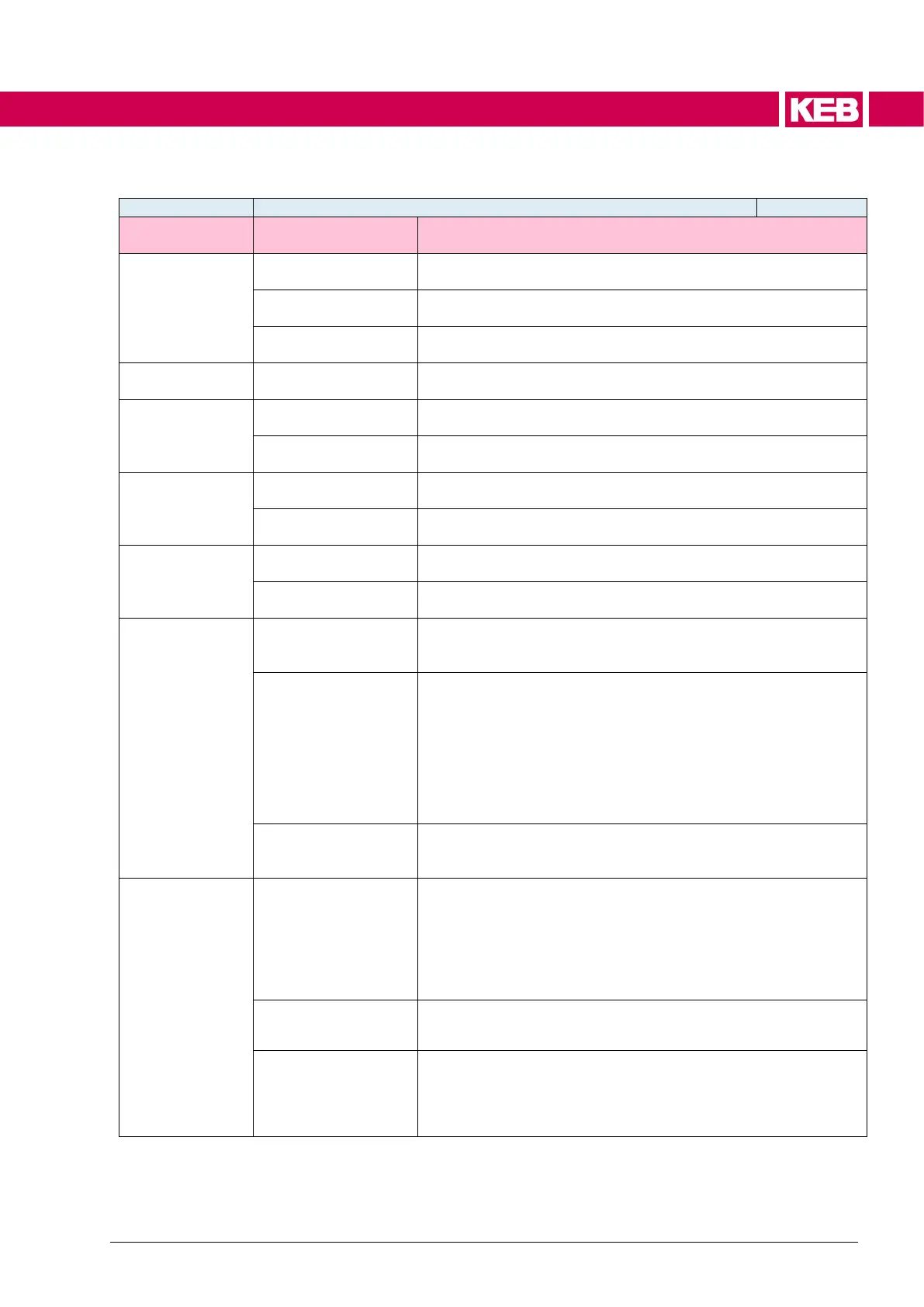
72 ident Rs, current
<> ref.
Current actual value unequal current set value
Stator resistance out of range (upper limit)
Stator resistance out of range (lower limit)
82 ident dt current
<> ref
Current actual value unequal current set value
Rotor position
detection (5-step
procedure)
102
rot. det. (5step) curr.
105 rot. det. (5step)
inf < dd07
Information content too small (dd08 < dd07)
Rotor position
detection (Hf de-
tection proce-
dure)
112
rot. det. (hf det) curr.
115 rot. det (hf det.)
inf. < level
Information content is too small (dd08 < dd07 or/and dd10 <
dd09)
Rotor position
detection (cvv)
122
rotor det. (cvv) curr.
Current stiff could not be executed
123
rotor det. (cvv) pos.
Encoder position has not rotated electrically by at least 12° in
the preset direction.
Motor phase fail-
ure detection
(DC signal)
131 least square,
max. voltage
reached
The maximum voltage was output for 50ms without reaching
the current setting.
Error, if e.g. two phases are missing
132 least square,
current not symmet-
rical
Current setting:
• for ASM => 0.5 * dr03
• for SM / IPM / SRM => 0.25 * dr03
Evaluation of two voltage vectors
Error when from a phase current not 30% of the expected
value is exceeded, or the sign of a phase current does not
agree with the expectation.
133 LeastSquare
DC, current not zero
The sum of the phase currents should be ZERO, if the sum is
greater than 30% of the expected total current, this error is
triggered.
Motor phase fail-
ure detection
(HF signal)
140 LeastSquareHf,
no information
The level of information is too low, e.g. due to the existing
maximum output voltage or the minimum excitation frequency.
Error: the current of 5% InMot cannot be reached
Cause: wrong parameterization
Perform check of the parameterized inductance, rated voltage
of the motor, rated current of the motor.
141 LeastSquareHf,
negativ values
The detected inductance is <=NULL
Cause: real phase failure
142 LeastSquareHf,
differenz > limit
The inductance is calculated from the Hf signal and the maxi-
mum / minimum value is determined. Error limit: Lmax / Lmin >
10
Cause: real phase failure

 Loading...
Loading...










