122
Electrical Specifications - Signal, continued
Encoder Input
(Slave)
Specifications
Table
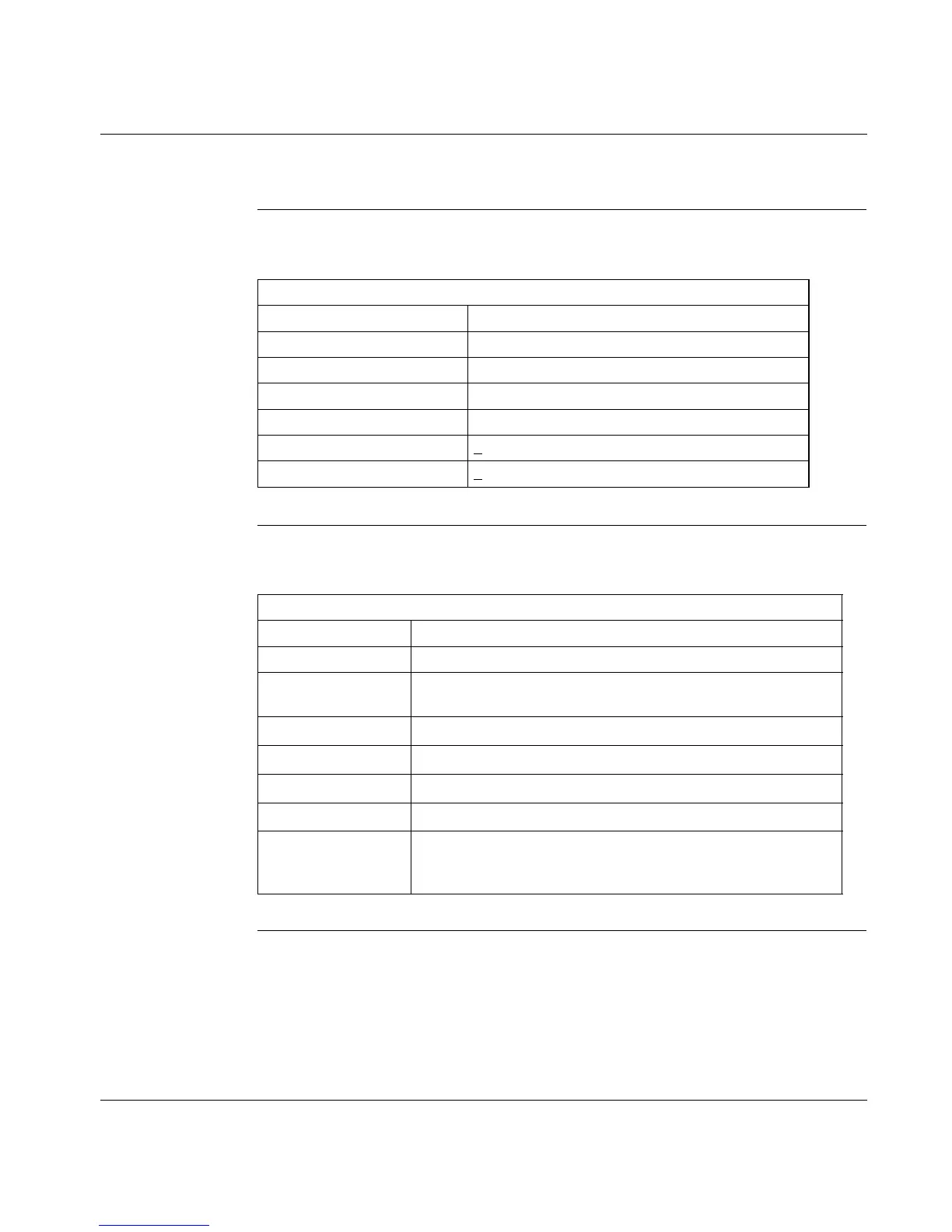
The following table provides 17D encoder input (slave) specifications.
Discrete Input
Specifications
Table
The following table provides 17D discrete input specifications.
Continued on next page
ENCODER INPUT (SLAVE)
Channels A and B
Type Differential, RS-485 compliant
Voltage 8 V nominal
Current 200 mA (maximum)
Maximum frequency 1.5 MHz
Rise time <
0.1
µ
s
Fall time <
0.1
µ
s
DISCRETE INPUT
Channels Five (four programmable and one dedicated for enable)
Type Solid state, optically isolated, compatible IEC1131-2 type1.
Transient
isolation voltage
250 Vac (channel to chassis)
V
IN
maximum 30 Vdc
I
IN
@ V
IN
= 24 V 5 mA
V
IH
minimum 12 V (minimum input voltage to be recognized as high – true)
V
IL
maximum 7 V (maximum input voltage to be recognized as low – false)
Scan time:
Normal
High speed
1 ms
< 50 µsec