Chapter 3 Before positioning
3- 54
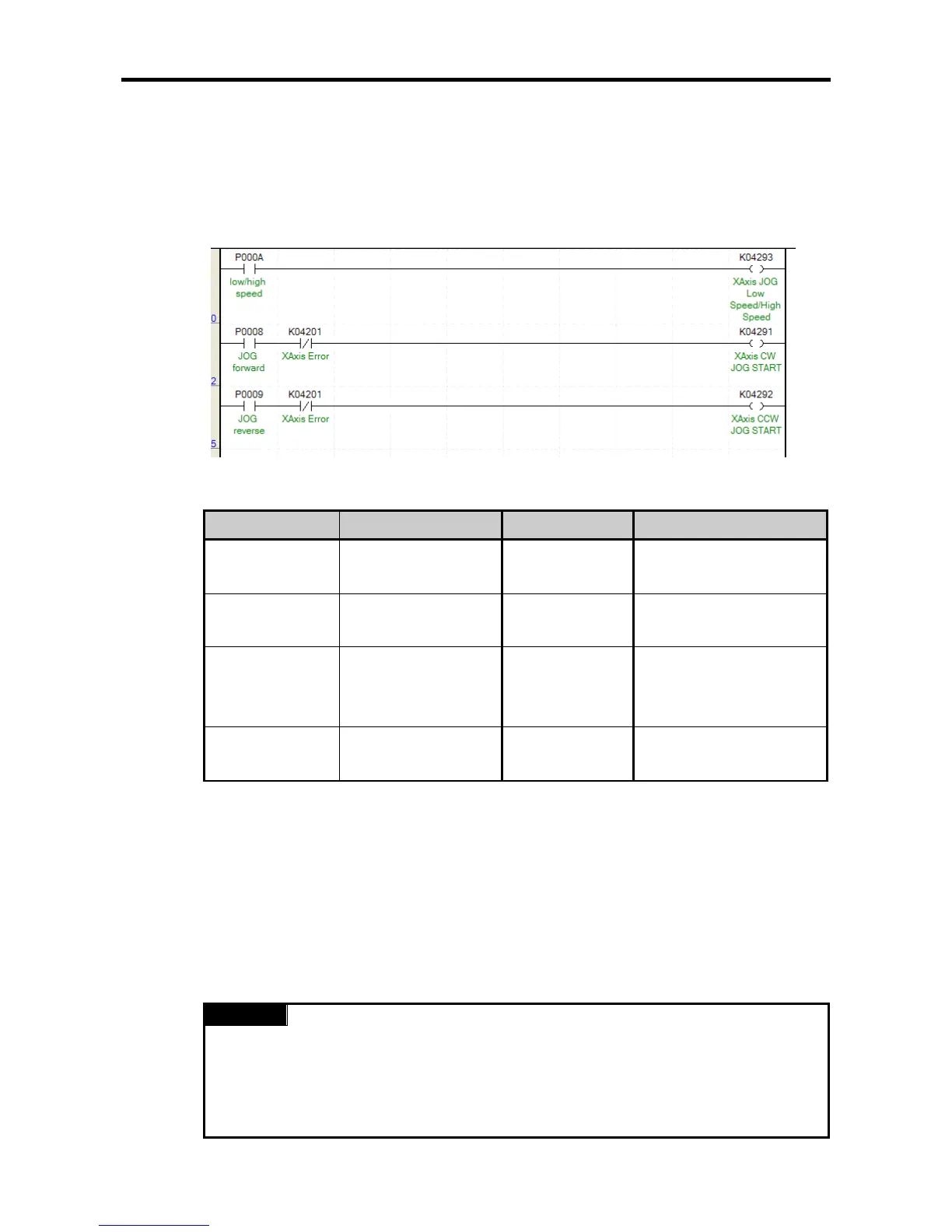
(b) Jog Operation
1) The following program is an example of the program that carries out the jog operation of axis X
by turning on/off the flag for commanding the normal/backward direction jog according to the
external input signal.
Device Description Device Description
P0008(%IX0.0.8)
External input of
normal direction jog
K4201(%KX6721) Flag displaying axis X error
P0009(%IX0.0.9)
External input of
backward direction jog
K4291(%KX6865)
Flag commanding normal
direction jog of axis X
P000A(%IX0.0.10)
External input of jog
low speed/high speed
K4292(%KX6866)
Flag commanding
backward direction jog of
axis X
K4200(%KX6720)
Signal of axis X during
operation
K4293(%KX6867)
Flag commanding jog
low/high speed of axis X
• The program above is an example of the program that carries out the jog operation in the
corresponding direction while the external input normal direction jog switch (P0008) or
backward direction jog switch (P0009) in On.
• Then the operation speed is jog high speed if the jog low/high speed external input (P000A) is
On, and high low if Off, and can be changed during jog operation, too.
• As the start and stop of jog operation is done by the level of the input signals, if the input signal
(P0008, P0009) is On, it operates, and if Off, it carries out jog stop.
• If both jog normal direction operation and backward direction operation are On, there is no error
code in XGB built-in positioning, but it stops if it is currently in operation.
Remark
• If you do jog operation by adding the signal (K4200(%KX6720), K4300(%KX6880)) during
operation as the normally closed contact point (contact point B) for the jog operation input
condition, it alternates starting and stopping according to the On/Off of the signal during
operation.