112 17. Heads connection – Programming Manual
External RPM sensor / accelerometer presence flags
The following indications near each balancing head mean:
External RPM sensor present for the corresponding balancing head
External RPM sensor NOT present for the corresponding balancing head.
Accelerometer present for the corresponding balancing head
Accelerometer NOT present for the corresponding balancing head.
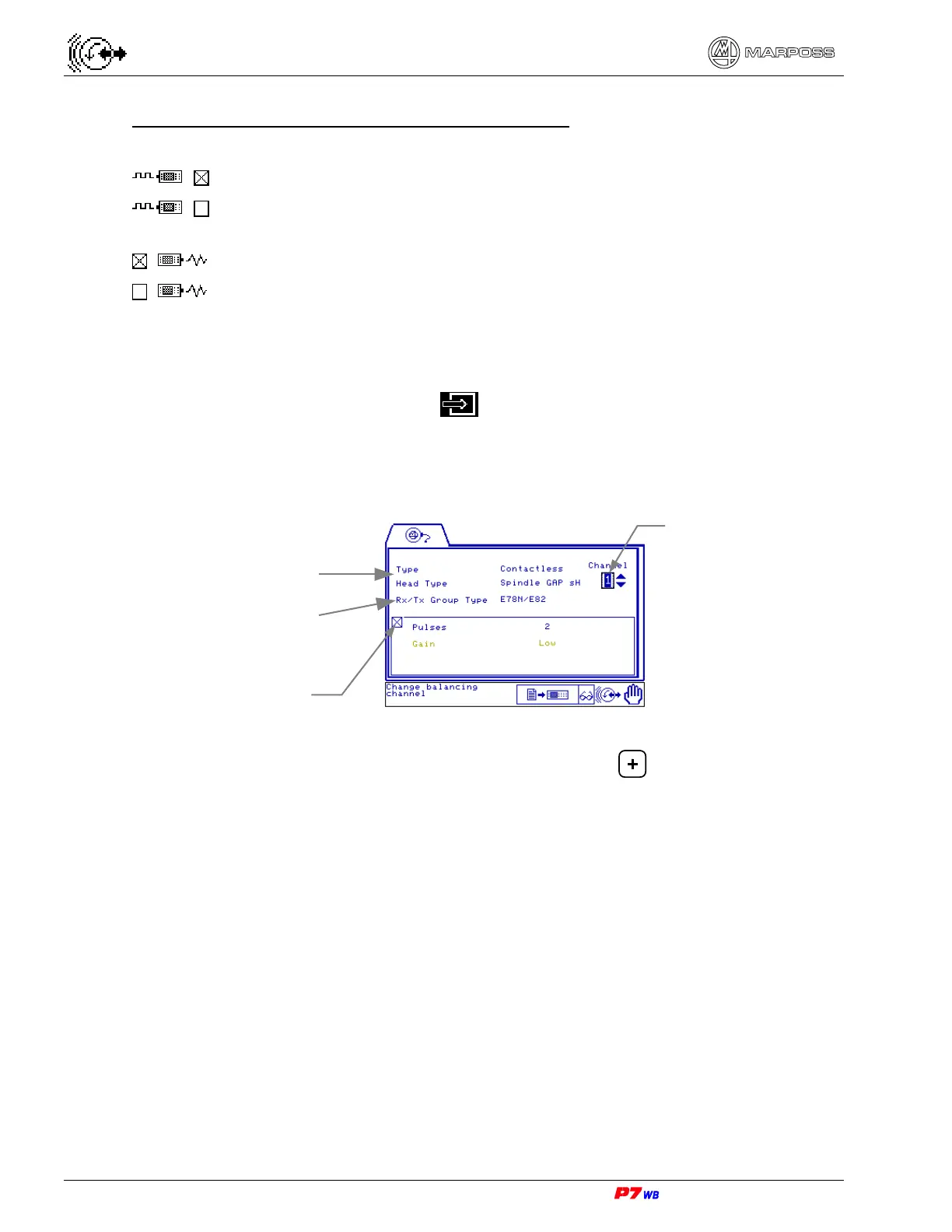
17.2.
Characteristics of heads connected to balancing channels
Page B6 of the “External Info” folder menu map (section 8.4, page 3).
This page shows the type of head connected to the selected channel (type defined
when configuring the application).
(1) Channel selection: with the field highlighted, press to select the desired
channel.
Pulses number of pulses during a revolution of the wheel.
Gain gain type (High / Medium / Low) on the noise measure acquisition.
Data valid with receiver/transmitter unit type “MINI CT” only.
Channel selection
Type of balancing head
connected
Head present
(enabling) flag.
present
not present
Type of
receiver/transmitter unit
 Loading...
Loading...