5-12
5-5 Brake Interlock
Operating Functions
5
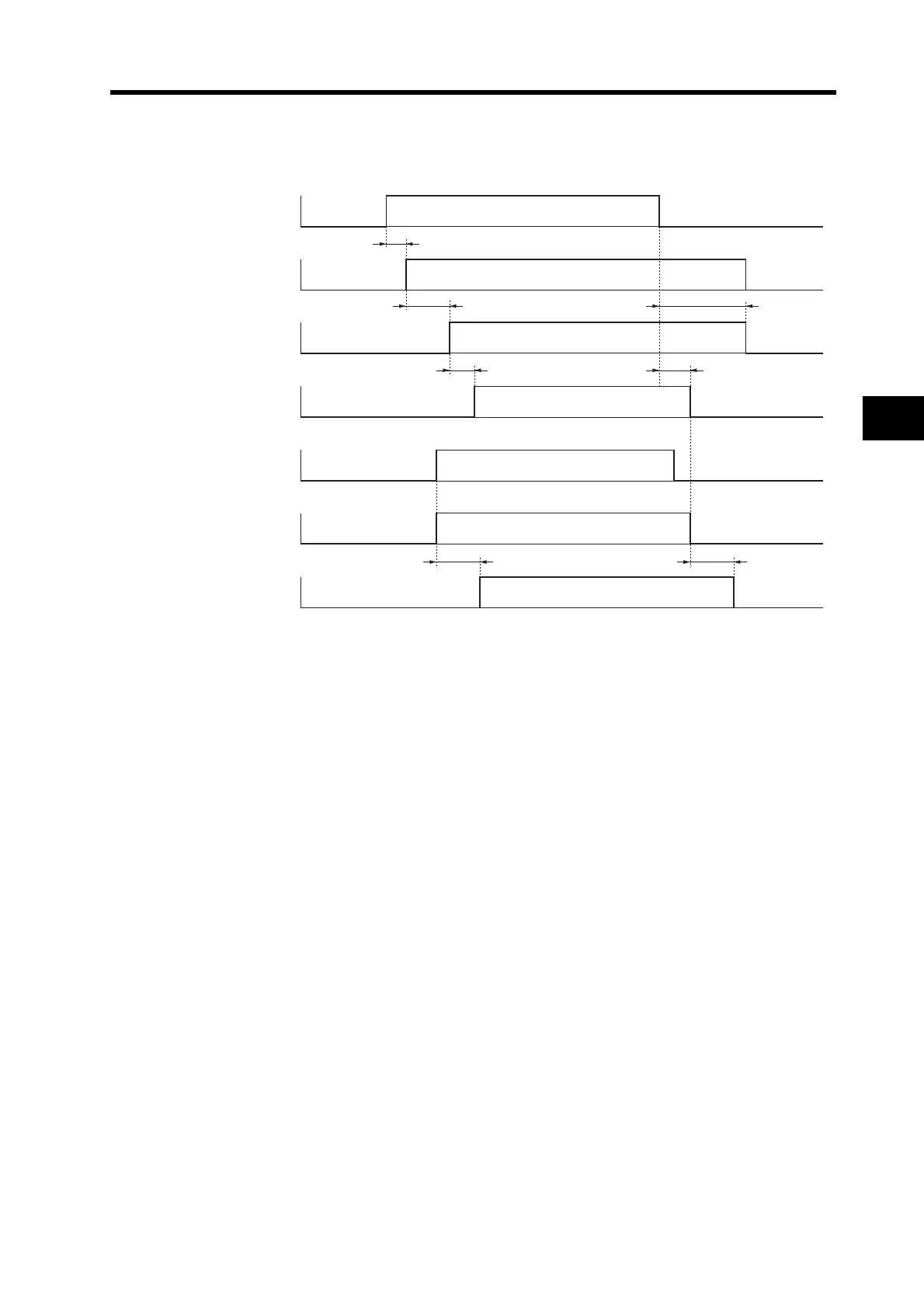
Operation timing during Servo ON or OFF (when Servomotor is stopped)
*1. The Servo ON status will not occur until the Servomotor speed drops below approximately 30 r/min.
*2. The operation of the dynamic brake during Servo OFF depends on the Stop Selection with Servo OFF (Pn069).
*3. The Brake Interlock (BKIR) signal is output on the release request command that comes first, either from the Servo
Controller or the MECHATROLINK-II. The BKIR signal is used by assigning it to the general purpose outputs on
CN1.
Note The brake attraction and release time varies depending on the brake on the Servomotor. For details, refer
to 3-2 Servomotor Specifications on page 3-17.
Run Command (RUN)
ON
OFF
Dynamic Brake
Relay
ON
OFF
Servomotor
ON
OFF
Break Release Request
via Servo Control
ON
OFF
Approx. 2 ms
Approx. 2 ms 1 to 5 ms
Approx. 40 ms
Brake Interlock
Output (BKIR)*3
Break Release Request
via MECHATROLINK-II
Control
ON
OFF
ON
OFF
Released
Engaged
Attraction Time Release Time
Servo OFF Servo OFFServo ON*1
DB Engaged DB Engaged *2DB Released
Energized
Release Request
Release Request
Release Request
Deenergized Deenergized
Pn06A
Holding Brake
Brake Released

 Loading...
Loading...







