5-15
5-5 Brake Interlock
Operating Functions
5
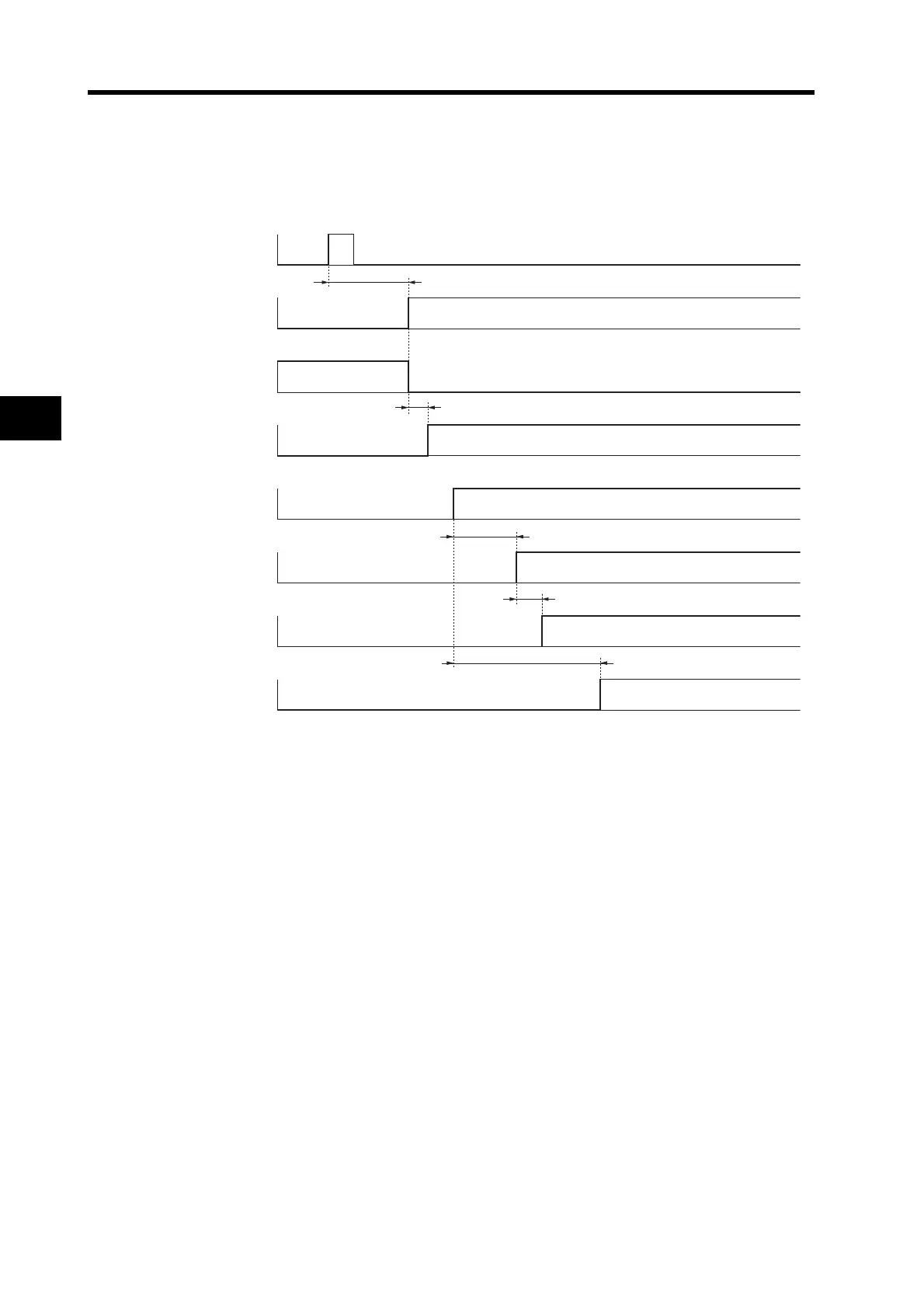
Operation timing at alarm reset
Perform an alarm reset from CX-Drive, host controller via MECHATROLINK-II, or the Parameter
Unit. (Alarms can also be reset by recycling the power.)
*1. Servo ON status will not occur until the Servomotor speed drops below approximately 30 r/min.
*2. The Brake Interlock (BKIR) signal is output on the release request command that comes first, either from the Servo
Controller or the MECHATROLINK-II. The BKIR signal is used by assigning it to the general purpose outputs on
CN1.
Note Servo OFF status occurs (Servomotor is de-energized) after the alarm reset. To go to Servo ON status,
issue the Servo ON command again after the alarm reset according to the operation timing shown above.
Alarm Reset
ON
OFF
120 ms
Reset
OFF
ON
OFF
Run Command
(RUN)
ON
OFF
ON
READY
ON
OFF
Approx. 40 ms
OFF
ON
OFF
ON
OFF
ON
Operation Command
Input
Servo OFF
Prohibited
Release Request
Enabled
Servo ON*1
0 ms min.
2 ms
100 ms min.
Dynamic Brake
Relay
Brake Interlock
Output (BKIR) *2
Servo Ready
Output (READY)
Alarm Output (ALM)
Alarm
Brake Engaged
DB Engaged DB Released
Alarm Reset
Servomotor
Deenergized Energized

 Loading...
Loading...







