5-84
5-26 User Parameters
Operating Functions
5
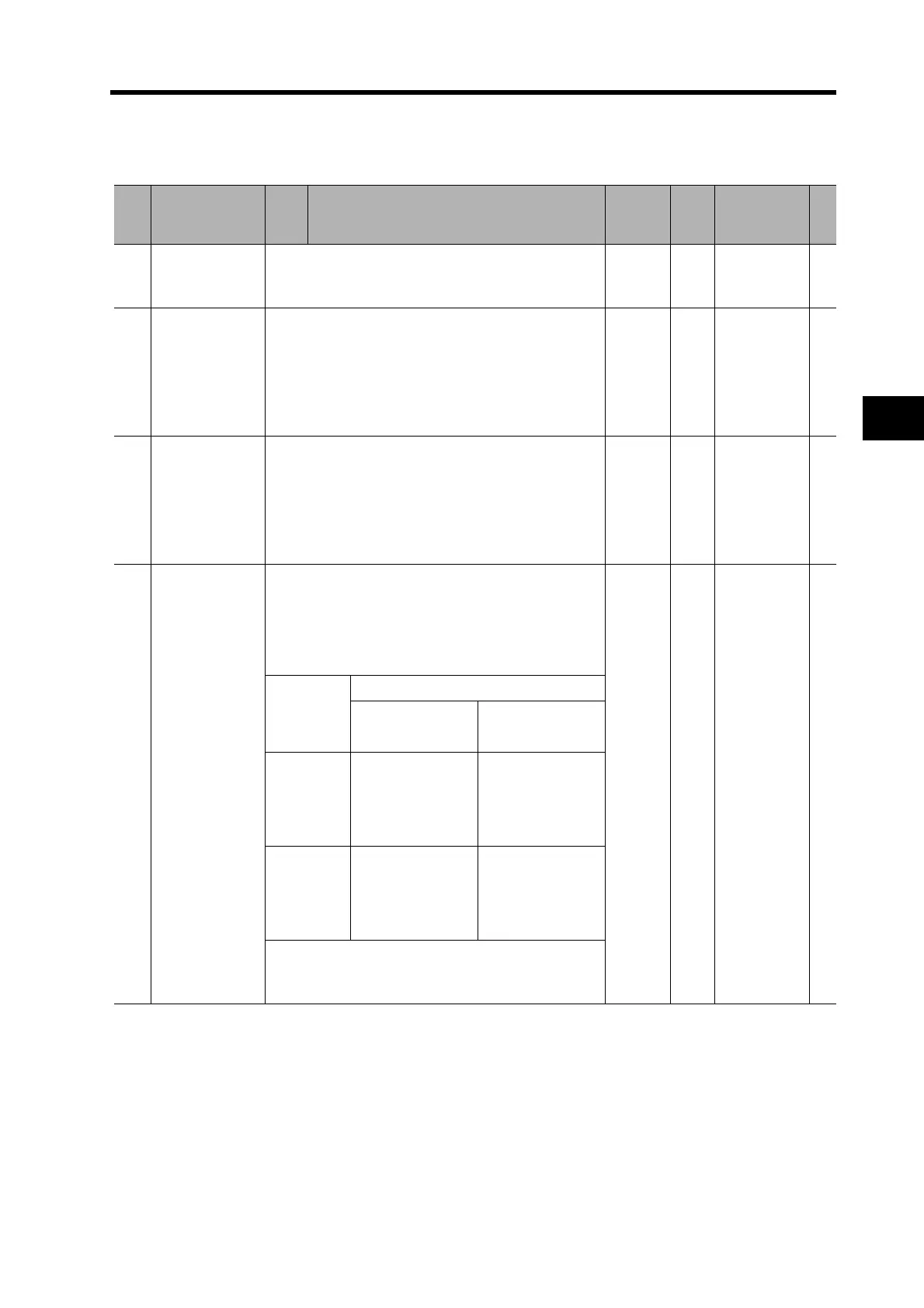
32-bit Positioning Parameters: Parameter No. 200 to 21F
Pn
No.
Parameter name
Set-
ting
Explanation
Default
setting
Unit Setting range
Attribute
200
Absolute
Origin Offset
Sets the offset amount for the encoder position and the
mechanical coordinate system position when
using an absolute encoder.
0
Com-
mand
units
1073741823
to
1073741823
C
201
Forward
Software Limit
Sets the soft limit in the forward direction.
If the Servomotor exceeds the limit, the network re-
sponse status (PSOT) will turn ON (=1).
Note1. Be sure to set the limits so that Forward
Software Limit > Reverse Software Limit.
Note2. PSOT is not turned ON when origin return is
incomplete.
500000
Com-
mand
units
1073741823
to
1073741823
A
202
Reverse
Software Limit
Sets the soft limit for the reverse direction.
If the Servomotor exceeds the limit, the network re-
sponse status (NSOT) will turn ON (=1).
Note1. Be sure to set the limits so that Forward
Software Limit > Reverse Software Limit.
Note2. NSOT is not turned ON when origin return is
incomplete.
500000
Com-
mand
units
1073741823
to
1073741823
A
203
Final Distance for
External Input
Positioning
Sets the distance to travel after detecting the latch
signal input position when performing external input
positioning.
The operation after detecting the latch signal input
position will be determined by the external input posi-
tioning direction and this parameter as follows.
100
Com-
mand
units
1073741823
to
1073741823
B
External
input
positioning
direction
Sign
Positive Negative
Positive
direction
Moves in the
positive direction
and stops*
1
Decelerates to a
stop, reverses, then
moves in the
negative direction
and stops
Negative
direction
Decelerates to a
stop, reverses, then
moves in the posi-
tive direction and
stops
Moves in the
negative direction
and stops
*1
*1. Reverses after decelerating to a stop if the final
distance for external input positioning is short in
comparison to the deceleration distance.

 Loading...
Loading...







