9-15
9-1 Parameter Tables
Appendix
9
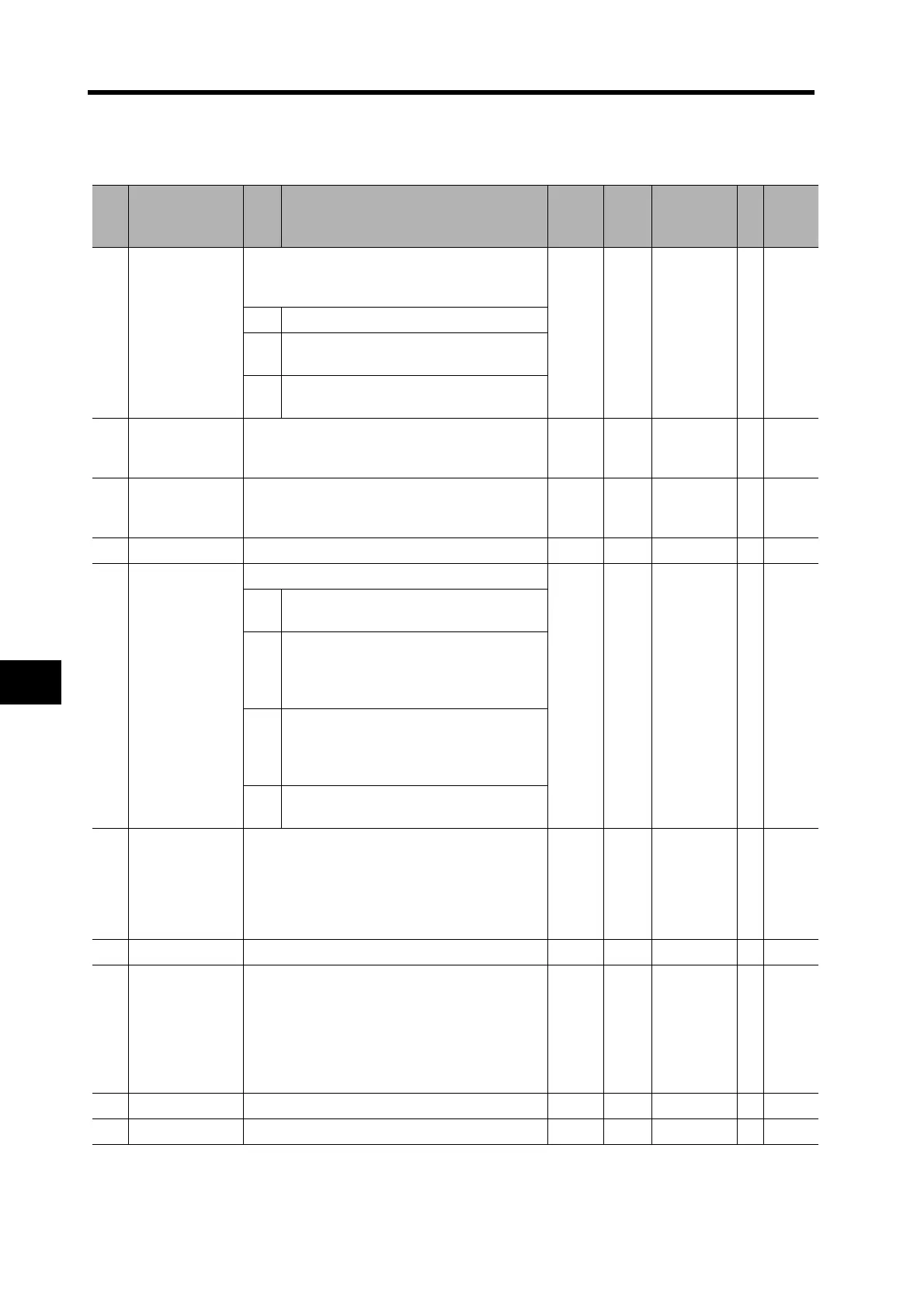
16-bit Positioning Parameters: Parameter Numbers 100 to 13F
Pn
No.
Parameter name
Set-
ting
Explanation
Default
Setting
Unit
Setting
Range
Attribute
Set
value
100
Backlash
Compensation
Selection
Enables or disables the backlash compensation
for position control, and sets the compensation
direction.
0 --- 0 to 2 C
0Disabled
1
Compensates in the initial forward
direction after the Servo ON.
2
Compensates in the initial forward
direction after the Servo ON.
101
Backlash
Compensation
Sets the backlash compensation amount for
position control.
0
Com-
mand
units
32768 to
32767
B
102
Backlash
Compensation
Time Constant
Sets the backlash compensation time constant
for position control.
0
0.01
ms
0 to 6400 B
103 Reserved Do not change. 0 --- --- ---
104 Soft Limit
Enables or disables the soft limit.
0 --- 0 to 3 A
0
Enable both the Forward / Reverse
Software Limits (Pn201 and Pn202)
1
Disable the Forward Software Limit
(Pn201),
enable the Reverse Software Limit
(Pn202)
2
Enable the Forward Software Limit
(Pn201),
disable the Reverse Software Limit
(Pn202)
3
Disable both the Forward / Reverse Soft-
ware Limits (Pn201 and Pn202)
105 Origin Range
Sets the threshold for detecting the origin
(ZPOINT) in absolute values.
ZPOINT = 1 when the return to origin completes
(coordinate system setup is complete) and the
feedback position is within the setting range of
this parameter.
10
Com-
mand
units
0 to 250 A
106 Reserved Do not change. 0 --- --- ---
107
Linear
Acceleration
Constant
Sets the acceleration for positioning operations.
A setting of "0" is regarded as "1".
The setting will be handled after conversion to
an unsigned 16-bit data (0 to 65535).
Example: 32768
8000h = 32768
1
FFFFh = 65535
100
1000
0
[Com-
mand
units/
s
2
]
32768 to
32767
B
108 Reserved Do not change. 0 --- --- ---
109 Reserved Do not change. 0 --- --- ---

 Loading...
Loading...







