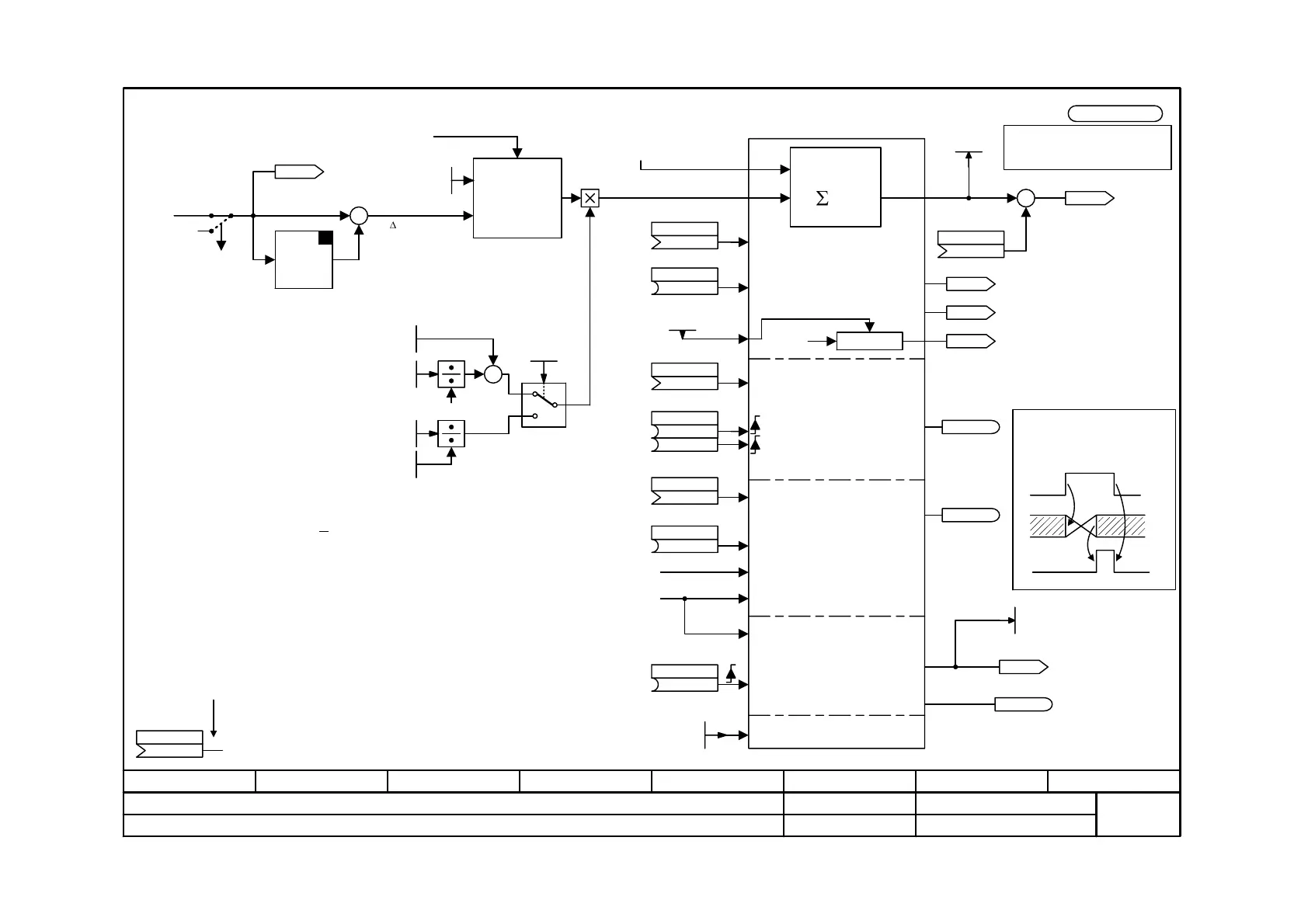
Function diagram
87654321
fp_mc_335_e.vsd
Position sensing
MASTERDRIVES MC
03.03.08
External encoder
-335 -
V2.5
Current rotor position from
external machine encoder
(SBM oder SBP)
0
Y
n
= X
n-1
–
+
+
-Rotor position
(Angle difference of
rotor position
between two
sampling times)
[LU]
[LU]
.01
.02
[LU]
Position sensing for
external machine encoder
MOD
Position measurement
(only for SBP)
only if rough pulse
not connected
Reference point detection
(only for SBP)
Position correction
Position sensing
SV
Y = SV
KOR
Y = Y + KOR
Y = Y - KOR
Summation
X
Y
n
= Y
n-1
+ X
n
X
n
Y
n
[LU]
Position from last
sampling cycle
[LU]
[LU] means the unit of length
defined by the actual-value
evaluation factor P152/P153.
Y
[815.5]
[815.6]
[815.6]
[815.6]
[815.5]
[815.5]
[815.5]
[815.6]
[815]
[815.6]
[LU]
+
+
Rough pulse 1 [255.3]
Fine pulse [255.3]
Test connector service/
diagnostic purposes
If position sensing is used for
positioning, it should be
calculated in T3.
[242.6], [255.6], [270.6]
<1>
These position manipulations are
carried out in a handshake
procedure:
Release or correct command
Acknowledgement
Position manipulation carried out
Shift multiplication
Y = X * 2
n
X
n
Fine resolution external encoder
(only SBM2) [270.6]
Y
Normalization
Determined
speed
<1>
[LU]
[815]
[815]
100000000
+
+
0xxx
1xxx
<2>
<2>
When the position-feedback scaling factor (AVWF) is
changed, the unit should be switched OFF and ON again
or
if the absolute encoder is in drive setting P60 = 5 and
changed back again, or a software reset P972 = 1 should
be carried out.
KK
P155 (0)
SrcPosSelVMEncod
B
P156 (0)
SrcPosSelMEncod
KK
P157 (0)
SrcPosConVMEnc
B
P158 (0)
SrcPosConMEnc
B
KK
P159 (0)
SrcPosSelVMEnc
B
P160 (0)
SrcRelRefMEncod
B
P162 (0)
SrcRelMVIMemMEnc
ConfPosSensMEnc
0 . 9999
P166 (0)
KK
P167 (0)
SrcPosOffsetMEnc
B0215
Ack. <1>
MaEnAcknRef
B0216
Ack. <1>
AckPosCorEncod
KK0126
MachEncPosTest
KK
Pxxx.B (0)
U950.17 = ___(6)
KK0125
PosActV MEncod
Pos ActV
r168
KK0105
PulseCntMachEn
KK0128
n(act) [LU/sec]
KK0129
n(act) [%]
FineResExtEnc.
0 ... 30
P154 (0)
Machine Reference Speed
P355
KK0127
MVal Mem Encod
B0217
AckMVal MEncod
Measured value memory
r163
extEnAVWF(bef.DP)
0 ... 999
P152 (1)
extEnAVWF(aft.DP)
0 ... 99999999
P153 (0)
Denominator P181.02 (1)
extEnAVWF.Numerator/Denom
0 ... (2
31
-1)
Numerator P181.01 (1)
P166.01
Start position [333.7] for the following
encoders:
- Multiturn encoder
with ser. protocol (EnDat/SSI),
- Opt. encoder with C/D track
(if position tracking is active)
<1>
Note: When entering the zero
offset for encoders in the position
detection (P166.02 = xxx1),
the encoder's zero pulse
correction should be deactivated
(P142.02 = xxx0).
P166 = xxx0
or B71 = 0
 Loading...
Loading...









