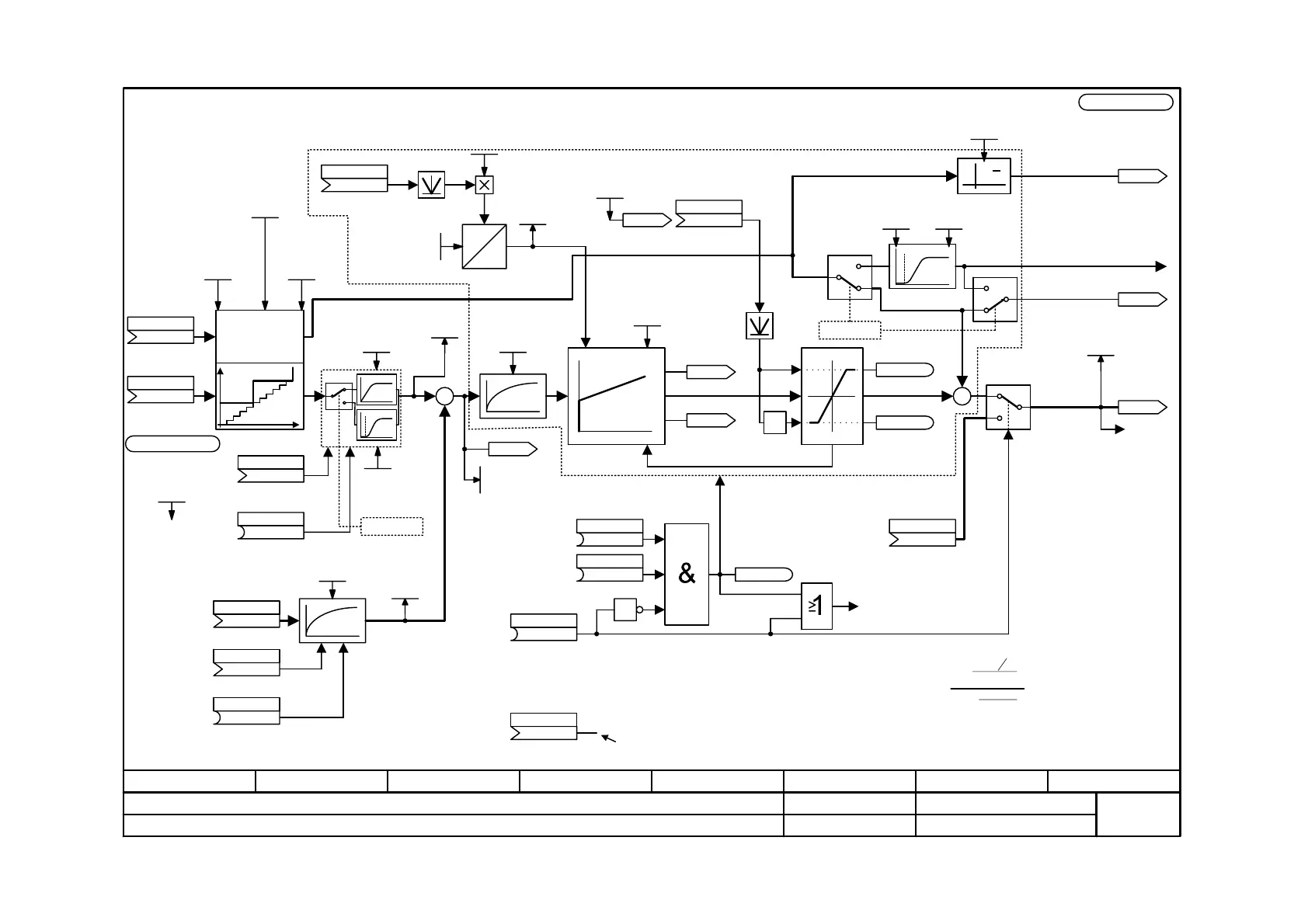
Function diagram
87654321
fp_mc_340_e.vsd
Position control
MASTERDRIVES MC
13.02.07
-340 -
V2.5
Position setpoint
interpolator
t
L ref.
Ü=2
P770
P
[LU]
+
–
T1
Kp Tn
x
y
-1
0
1
KV
Kp
Limitation of I-component
[LU]
[LU]
1
Release This block is only calculated
if release has been effected.
[LU]
LU means that a position value in length units [LU] is
expected at this parameter.
<1>
<1>
Vrated = Rated speed
[817.6]
[817.6]
[817.6]
[LU]
[LU]
KK0120 = Pos ActV from
motor encoder [330.6]
[817.6]
[LU]
+
+
Release of ramp gen. bypass
by position control [320.6]
d
dt
[320.8]
<2>
Is the transmission ratio
>0 : results in an extrapolation (advance calculation)
<0 : results in an interpolation
of the position setpoint (if P774 = 0)
<2>
<3>
In the case of parameter value
P771 = 0 the maximum jump is
calculated automatically.
<3>
0
1
n-PRE with Pos n-Reg
with TorqPRE [360a.1]
P238 Bit1
P238 Bit1
1
0
1
0
[]
(100%)0000 4000
V
Kv
Kp
hex
min
LU 1000
rat
LU
min
LU 1000
⋅
⎥
⎦
⎤
⎢
⎣
⎡
=
KK
P190.B (310)
Src Pos Setp
Transmission ratio.
sampling time
-8 ... 8
P770 (3)
Max. jump
for interpolation
0 ... (2
31
-1)
P771 (0)
Smooth Pos Set
0.0 ... 1000.0 ms
P191.F (0.0)
KK
P192.B (0)
Src SetV PosSet
B
P193.B (0)
Src Set PosSet
Pos Setp
PosReg
r200
Smooth Pos Diff
0.0 ... 1000.0 ms
P199.F (0.0)
Pos Reg Time
0 ms = P-Regler
>0 ms = PI-Regler
0 ... 10000 ms
P206.F (0)
KK0132
PosReg (P-port)
KK0133
PosReg (I-port)
B0221
PosRegFWDLimitr
B0222
PosRegREVLimitr
KK0131
PosReg (Outp)
Pos Reg Output
r214
KK
P212.B (311)
Src Ctrl Setp
KK
P209.B (312)
Src PRE PosReg
K
P203.B (1)
Src PosRegAdapt
Pos Reg Kv
0.000 ... 20.000
P204.F (0.100)
V rat
[1000 LU/min]
0 ... 20000000
P205 (12288)
PosReg
Gain(act)
r208
PosRegLimitFix
0.0 ... 199.9 %
P207.F (100.0)
KK0134 KK
P202.B (134)
SrcPosRegLim
Smooth Pos Act
0.0 ... 1000.0 ms
P195.F (0.0)
KK
P196.B (0)
Src SetV PosAct
B
P197.B (0)
Src Set PosAct
KK
P194.B (120)
Src Pos ActV
PosAct PosReg
r201
B
P213.B (305)
Src Release Ctrl
B
P211.B (104)
Src2 Rel PosReg
B
P210.B (0)
Src1 Rel PosReg
B0220
PosReg Rel
KK
Pxxx.B (0)
n959.51 = 1
KK0130
Pos (Deviation)
PosActSetp Diff
r198
Diff. time position control
torque precontrol
0.000 ... 100.000 s
P773 (0.000)
KK0135
U953.40 = __ (3)
TimeSlot PosSetp
2 ... 10
P187 (2)
KK0136
PosReg n-PRE
Tdead n-PRE
0.0 ... 4.9 SamplT
P164.F (2.0)
Smooth n-PRE
0.0 ... 1000.0 ms
P165.F (0.0)
Mode
P774 (0)
SamplingT
Tdead PosSetp
0.0 ... 4.9
P161.F (2.0)
 Loading...
Loading...









