-100 %
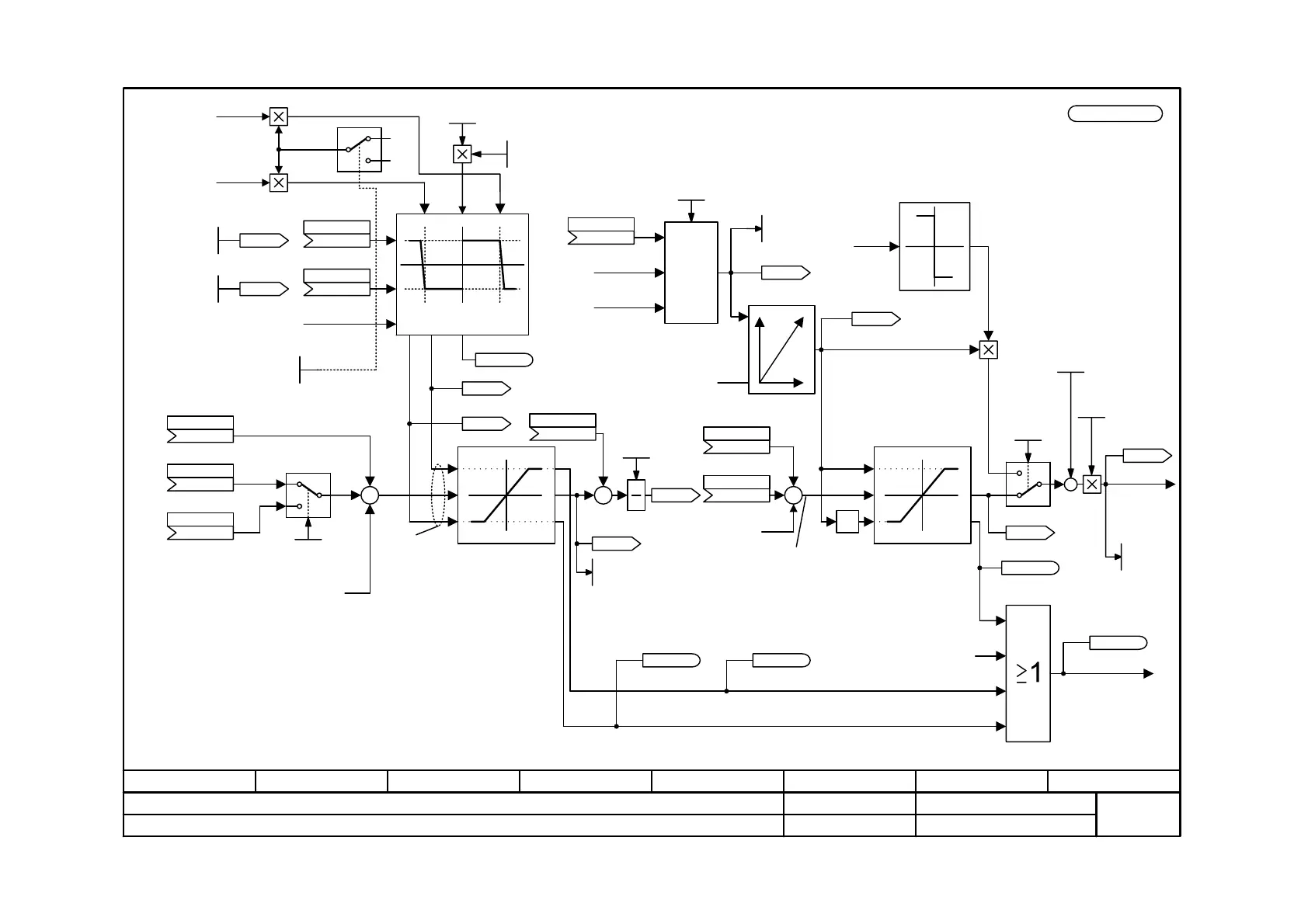
Function diagram
87654321
fp_mc_370_e.vsd
Torque limitation
MASTERDRIVES MC
03.03.08
-370 -
V2.5
to current
control
[390.2], [389.2]
0
1
x
y
+
x
y
x
y
x
y
0
1
+
+
Speed limiting
controller
y1
y2
x
y1y2
+
MIN
[490.4]
I²t calculation
Imax(Drv)
(depends on the
pulse frequency P340)
Isd(set,active)
from current control
-1
100 %
[500.5]
n(act)
from encoder
evaluation slot C
Current controller in limitation
from current controller
[390.8], [389.8]
Limitation active
to speed controller
[360.7]
n(act)
from actual-value
conditioning slot C
[500.5]
x
<1>
[in % of P354]
[in % of P350]
[in % von P350]
[in % of P350]
<1> For normalization of torque and currents, see [20]
+
+
<2>
<2> in the case of Compact/chassis max. 1.6 I
ConvNom
in the case of Compact PLUS max. 3 I
ConvNom
0
1
1,0
1,1
[320.7] max.
pos. speed
[370.7] max.
neg. speed
maximum 205 % of the reference speed
maximum -205 % of the reference speed
Compensation current
Harmonic
compensation
[630.7]
+
Cyclic
load compensation
(CLC) [631.6]
K0167
Isq(set,limitr)
K
P270.B (166)
Src I(sq,set)
K
P271.B (0)
Src I(sq,add)
K0166
Isq(set)
Magnetizing of
current control
[390.7], [389.7]
K0165
Torq(set,limit)
Torq (set, Lim)
r269 [Nm]
K
P260.B (153)
Src Torq (set)
K
P261.B (0)
Src Torq(conseq)
K
P262.B (0)
Src Torque(add)
FSetpTorq(Lim1)
-200.0 ... 200.0 %
P263.F (100.0)
K0170
T(limit1,set)
K
P265.B (170)
Src Torq(Limit 1)
FSetpTorq(Lim2)
-200.0 ... 200.0 %
P264.F (-100.0)
K0171
T(limit2,set)
K
P266.B (171)
Src Torq(Limit 2)
0.1 … 100.0
P247.F (1.0)
K0172
Torq(limit1,act)
B0230
n-LimitrReg act
K0173
Torq(limit2,act)
K
P275.B (2)
Src I(max)
Max Current
0.0 ... 1000.0 A
P128 (~)
K0175
Imax(perm)
I(max,set)
r129 [A]
n959.53 = ___(0)
K0176
Isq(max.,abs.)
B0233
AmpLimitr act.
No OFF3
from sequence
control
K0168
Isq(set,act)
Isq (set,act)
r272 [A]
Factor: clockwise/
anti-clockwise
[500.5]
B0234
n-Reg in Limitr
B0232
Torq(Lim2)act.
B0231
Torq(Lim1)act.
Master/slave drive
from control word 2 [190.5]
K
P267.B (0)
Src T(Add3)
n-Reg Gain (act)
[360.7]
P238 bit 2(0)
From VdMax
control
K0271
 Loading...
Loading...









