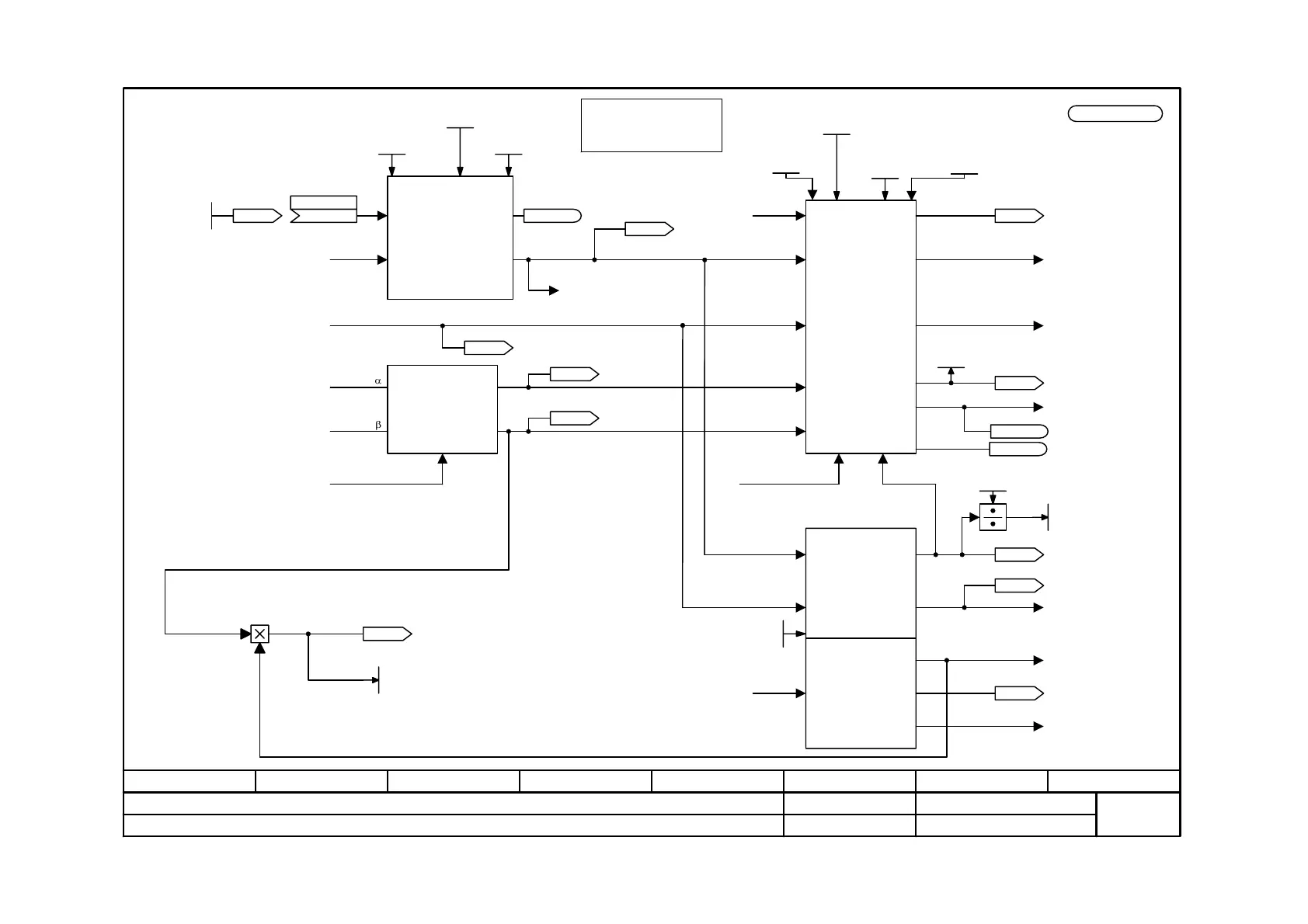
Function diagram
87654321
fp_mc_390a_e.vsd
Current controller asynchronous motor (P296 = 3)
MASTERDRIVES MC
03.03.08
- 390a -
V2.5
Reference variable for fluxes
Psi(...): rated magnetizing
Flux reference
control
and
flux control
Flux (act) from flux model [390.7]
to torque
limitation
Current control
Decoupling
Pre-control
Vector rotation
V
dc
link from actual
values [500.8]
Isq(set,act.)
from torque limitation [370.8]
Transformation
I
from actual values [500]
Transformation angle from flux model
[390.7]
I
from actual values [500]
to gating unit
[420.2]
to gating unit
[420.2]
to torque limitation
[370.7]
Pulse release
from sequence control
Flux model
Tr-Adaption [394]
to flux control [390.2]
Magnetization
to torque limitation
[370.4]
Transformation angle
to transformation
[390.2]
from actual values [500.4]
Is only calculated for
P290 (Sel V/f,I-Reg) = 0
(=current control) [420.3]
and P296 = 3
K0241 is calculated in 4T
0
FSetp Flux (set)
20.0 ... 200.0 %
P291 (100.0)
K0180
K
P292 (180)
Src Flux (set)
Select Flux Reg
0 / 1
P294 (0)
FieldWKFreq
0.0 ... 400.0 Hz
P293 (~)
B0251
Field weakening
K0183
Isd(set,act)
Amps Reg Gain
0.0 ... 200.0 %
P282 (80.0)
K0182
Isd(act)
K0184
Isq(act)
K0189
U(set,abs.)
B0250
I-Reg in Limitr
KK0186
Theta(I-Reg)
K0181
Psi(act)
K0188
n(slip)
n959.54 = ___(0)
K0241
M(act)
M(act)
r007 [%]
Ki-
Current controller
0.0 ... 100.0 %
P285 (0.0)
K0168
Isq(set,active)
K0185
Isq(Deviation)
Position test angle
in mech. degrees
r286
zP
Motor #pole pairs P109 [391.3]
U(set, abs.)
r003
Flux Ctrl Gain
P297
f (Switch./Mod)
1 ... 99 %
P314
f (Switch. EMK Mod)
1 Hz ... 8xP107
P313
B0253 EMF model active
Smooth Psi(act)
0 … 200 ms
P301 (0)
 Loading...
Loading...









