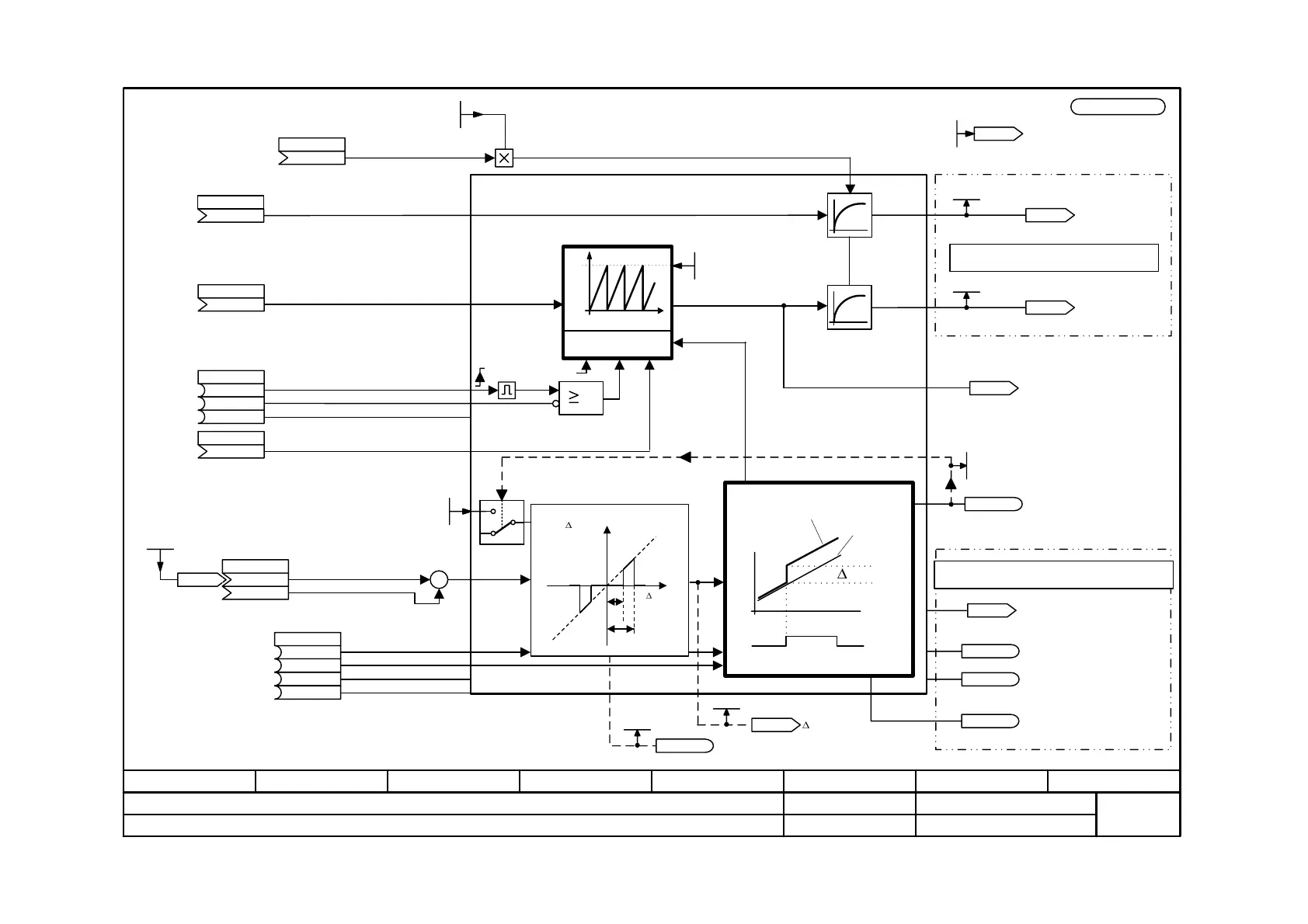
- 789c -
Function diagram
87654321
fp_mc_789c_e.vsd
Free blocks
MASTERDRIVES MC
01.07.03
Basic Positioning: Correction Block / Homing
V2.5
Correction value COR [LU]
(e.g.: P174 = 885 [330.5])
Start Ref.
.2
Set position setpoint
ENABLE_REF
KK0120
[330.8]
s_set
and
s_act
t
With homing
s_Corr
Limiting to ACL
SET
SET
VALUE
RESET
POWER ON
s_ Corr
F(
s_ Corr)
F1
F2
Reference position
Act. pos. on interrupt
.4
PT1
PT1
1
0
[REF]
Enable homing
[ENABLE_
POS_REF]
–
+
1
0
[V _pos[%]]
[S_pos [LU]]
.1
.3
KK0122 [330.7]
(Measured pos val)
(880)
(122)
(0)
.3
.4
[F_REF_WD]
For position detection
(e.g.: position detection for motor encoder [330])
For position controller
(e.g.: [340])
(e.g.: P209.B = 881 [340.1])
(e.g.: P190.B = 882 [340.1])
Change takes effect
on standstill
.7
Measured value_ok
"Valid meas. value"
from motor enc.
REF_D_REF (0=CW)
REF_D_REF_EN
[REF_D]
B0212 [330.7]
(ACKNOWLEDGEMENT
Valid meas val)
U953.62=___ (20)
B0891
Enable measured value memory
(e.g.: P179 = 891 [330.5])
B0890
NOV (Pos. correction -COR)
(e.g.: P175.2 = 890 [330.5])
B0889
POV (Pos. correction +COR)
(e.g.: P175.1 = 889 [330.5])
KK0885
KK
U877.2(120)
Position setpoint setting
KK
U877.1(871)
Src. Position set IN
KK
KK
U876(870)
Src. V-set IN
Smoothing time
0...10.000(s)
U880(0)
F1=Inner window
F2=Outer window
0...2
32
-1
U879.1 (0) F1
U879.2 (0) F2
B0892
Printing mark outside window 2
B0888
[ARFD]
Axis referenced
KK0880
Fixed connector
Ref. setpoint
U874.2(0)
B
U878
Src. STW_REF
KK
U877
Homing position.
B (212)
U878
KK0883
Position actual value [LU]
(to > U850.2 [789b.1])
n860.3 [%]
KK0881
Speed
setpoint [%]
KK0882
Position setpoint [LU]
n861.3 [LU]
KK0884
S-Corr[LU]
n861.4 [LU]
n862.2 /11
K0889
Status word: Output E.-Pos.
and Ref.
n862.2
n862.2 /10
K
U881 (1)
Src. Adaption smoothing t.
B (895)
.5
B (0)
.6
B (870)
B (70)
B (871)
Axis cycle ACL
0...2
31
-1
U858.2 (-1)
(-1): U858.2 = U858.1
 Loading...
Loading...









