Function diagram
87654321
fp_mc_804_e.vsd
Technology option
MASTERDRIVES MC
23.10.02
Machine data
-804 -
<2>
Name
(Factory setting) [Page in function diagram]
Position-encoder type / axis type (1)
Reset after an alteration of technology
[RST] [809.4] or switch power on/off
Axis assignment (1)
Name give to the axis for automatic mode
Reference-point coordinate (0) [821.4]
Reference-point offset (0) [821.5]
Reference-point approach (1) [821.3]
Reference-point reducing velocity
(500) [821.3]
Reference-point approach velocity
(5000) [821.3]
0 = Homing with bero and zero mark
1 = Homing with bero only
2 = Homing with zero mark only [822]
Position-encoder alignment (0) [815.4]
(offset for absolute-value encoder)
Linear/rotary axis length (4096)
[836.6] [837.3] [841.7]
Software limit switches - negative, for linear axis
(-999 999 999) [819.7] [823.7]
Software limit switches - positive, for linear axis
(999 999 999) [819.7] [823.7]
Following error monitoring - at standstill
(100) [818.6]
Following error monitoring - in motion
(20 000) [818.6]
In position - timer monitoring (500)
In position erreicht - exact stop (100)
Acceleration (1000) [819.5] [823.4]
Deceleration (1000) [819.5] [823.5]
Deceleration for collision (1000) for autom. mode
Jerk limiting - positive for roll
feeding (0) [830]
Traversing velocity - maximum (12 288)
must be = P205 [340.2] [817.5] [836.7]
M functions - output type (1)
for automatic mode
M functions output time (500) for automatic mode
Time override (1) for MDI and automatic mode
MD No. I A W
<2>
Range of values
MD1
MD2
MD3
MD4
MD5
MD6
MD7
MD8
MD10
MD11
MD12
MD13
MD14
MD15
MD16
MD17
MD18
MD19
MD20
MD21
MD23
MD24
MD25
MD26
IA W
IA W
I
I
I
I
I
A
I A W
I A
I A
I A W
I A W
I A W
I A W
I A W
I A W
I A W
W
I A W
I A W
I A W
I A W
0 = Axis does not exist
1 = Axis with incremental position encoder
(resolver, ERN encoder, pulse encoder)
2 = Axis with absolute position encoder
3 = Roll feed
1 = X axis 2 = Y axis 3 = Z axis
4 = A axis 5 = B axis 6 = C axis
-999 999 999... 999 999 999 LU
-999 999 999... 999 999 999 LU
1 = Reference point to right of proximity switch
2 = Reference point to left of proximity switch
3 = Set reference point
1... 19 999 999 [x 1000 LU/min]
1... 19 999 999 [x 1000 LU/min]
-999 999 999... 999 999 999 LU
0 = Linear axis >0 = Rotary axis
1... 999 999 999 LU = Length of rotary axis
-999 999 999... 999 999 999 LU
-999 999 999... 999 999 999 LU
1... 100 000 LU
1... 999 999 999 LU
10... 99 999 ms [811.4]
1... 99 999 LU [811.4]
1... 99 999 [x 1000 LU/s
2
]
1... 99 999 [x 1000 LU/s
2
]
0... 99 999 [x 1000 LU/s
2
]
1... 999 999 [x 1000 LU/s
2
]
0 = inactive
0... 19 999 999 [x 1000 LU/min]
[821.5] [825.5][837.2]
1 = During positioning, time-driven
2 = During positioning, acknowledge-driven
3 = Before positioning, time-driven
4 = Before positioning, acknowledge-driven
5 = After positioning, time-driven
6 = After positioning, acknowledge-driven
7 = Actual-value dependent, time-driven
8 = Actual-value dependent, acknowledgement-driven
9 = Expanded, actual-value dependent, time-driven
10 = Expanded, actual-value dependent, ackn.-driven
4... 99 999 ms
0 = Time override active
1 = Time override inactive
MD29
MD30
MD31
MD32
MD33
MD34
MD35
MD36
MD37
MD38
MD39
MD40
MD41
MD42
MD43
MD44
MD45
MD46
MD47
MD48
MD49
MD50
W
W
W
W
W
W
W
W
W
I A W
A
I A W
I A W
I A W
I A W
I A W
I A W
W
I A W
W
I A W
I A W
Acceleration breakpoint - velocity
for roll feeding (0) [830.2]
Deceleration breakpoint – velocity
for roll feeding (0) [830]
Accelerating breakpoint - acceleration
for roll feeding (0) [830]
Deceleration breakpoint - deceleration [830]
for roll feeding (0)
Constant travel time for roll feeding (0)
[830]
Pre-position reached - lead time
for roll feeding (0) [830]
Pre-position reached - output time
for roll feeding (0) [830]
Acceleration overshoot (0) [830]
Response after abort (0) [830]
for roll feeding
Backlash compensation (0)
Backlash compensation - preferred position (1)
with absolute position encoder
Backlash compensation – velocity
limitation (999)
Acceleration time, operating mode "reference-
point approach/control" (1000) [821.4] [825.5]
Deceleration time, operating mode "reference-
point approach/control" (1000) [821.4] [825.5]
Deceleration time during errors (1000)
e.g. when following error > MD15 [818.7]
External block change - setting (0)
for automatic mode
Digital inputs E1... E6 for positioning -
function 1 (0) [813.3]
Digital inputs E1... E6 for positioning -
function 2 (0) [813.5]
Digital outputs A1... A6 for positioning -
funktion 1 (0) [813.3]
Digital outputs E1... E6 for positioning -
function 2 (0) [813.5]
Precontrol – velocity
Evaluation factor (0) [817.6]
Precontrol – Acceleration
Evaluation factor (0) [817.5]
1... 1 500 000 [x 1000 LU/min]
0 = inactive
1... 1 500 000 [x 1000 LU/min]
0 = inactive
1... 99 999 [x 1000 LU/s
2
]
0 = inactive
1... 99 999 [x 1000 LU/s
2
]
0 = inactive
1.. 99 999 ms
0 = inactive
1... 99 999 ms
0 = inactive
1... 99 999 ms
0 = inactive
0... 100% (for roll feeding)
0 = Standard response
1 = Approach last target position with no
evaluation of direction of movement
2 = Approach last target position with
evaluation of direction of movement
0... 9 999 LU
1 = Preferred position positive (no backlash
compensation calculated during first
positive traversing movement)
2 = Preferred position negative (no backlash
compensation calculated during first
negative traversing movement)
1... 999 [x 1000 LU/min]
0 = inactive
1... 99 999 ms (from 0 to MD23 [340.2])
0 = inactive
1... 99 999 ms (from MD23 to 0 [340.2])
0 = inactive
1... 99 999 ms (from MD23 to 0)
0 = inactive (jump function)
0 = Warning at end of NC block
1 = No warning at end of NC block
0... 9 (range of values per decade)
0... 4 (range of values per decade)
0... 6 (range of values per decade)
0... 5 (range of values per decade)
0... 150 %
1... 99 999 [x 1000 LU/s
2
]
0 = Acceleration precontrol switched off
MD-No. I A W
<2>
Range of values
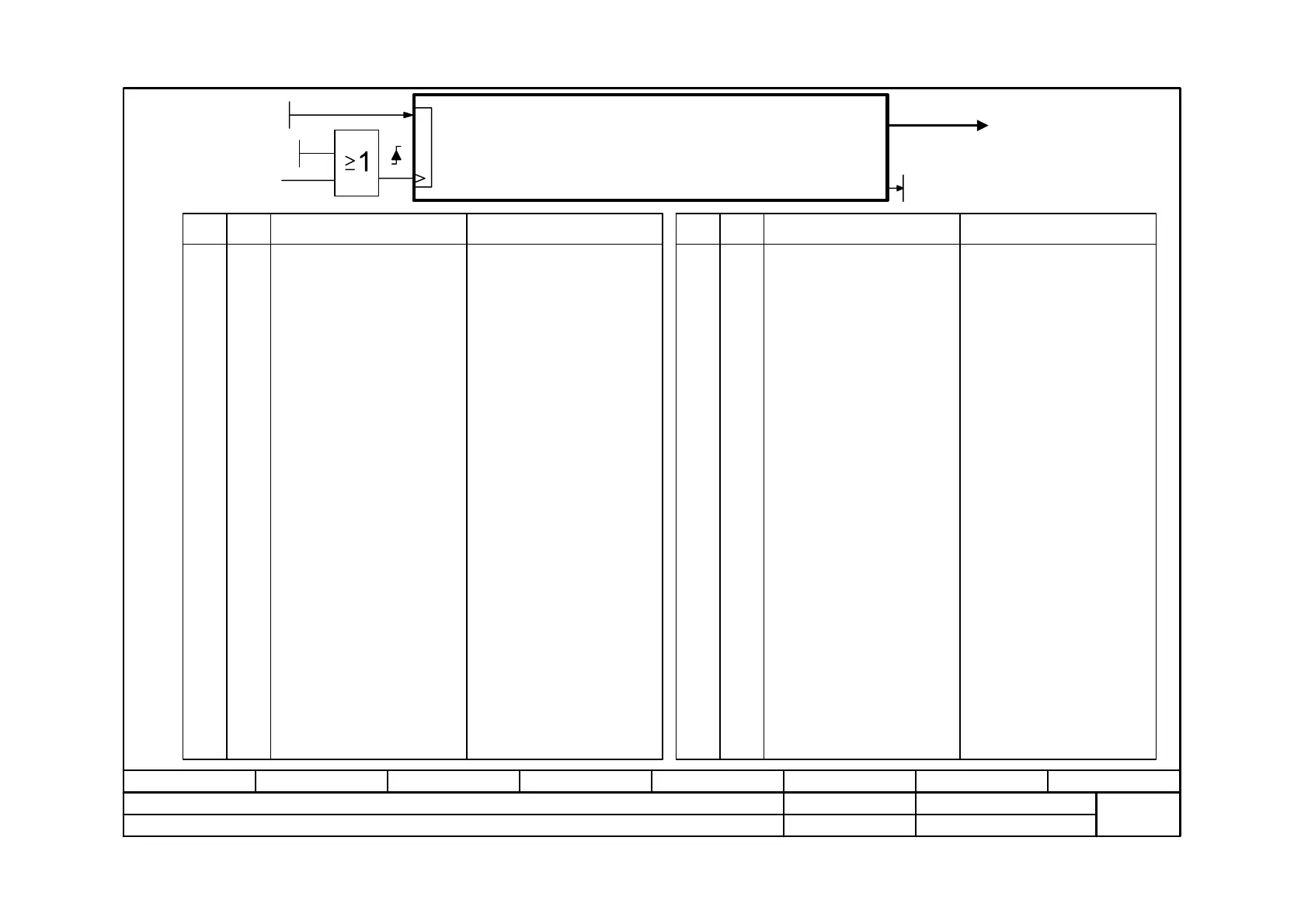
POWER ON (electronics
power-supply ON [710.5])
Machine data
MD1...MD50
0
2
<1>
U502=0 : Machine data OK
U502=1 : Machine data haven been changed and not yet transferred and checked or the
check detected a fault (fault status in n500)
U502=2 : Command for checking and transferring machine data (only possible when drive at a
standstill). If the machine data are OK, the value "0" is automatically entered in U502.
If the machine data are not OK, U502 jumps back to the value "1".
Machine data transfer
<1>
Name
(Factory setting) [Page in function diagram]
I = Needed for incremental encoder (resolver, ERN encoder, pulse encoder...)
A = Needed for absolute-value encoder (EQN, SSI, ...)
W = Needed for roll feeding
V2.5
Machine data MD1...MD50
U501.01 … 50
Adopt machine data
0...2
U502 (0)
Error number machine data
(when U502 = 2; For fault numbers, see "Error message-
Request management" e.g.: 2039 = MD 12 > MD 13)
n500
 Loading...
Loading...









