Function diagram
87654321
fp_mc_830_e.vsd
Technology option
MASTERDRIVES MC
02.02.04
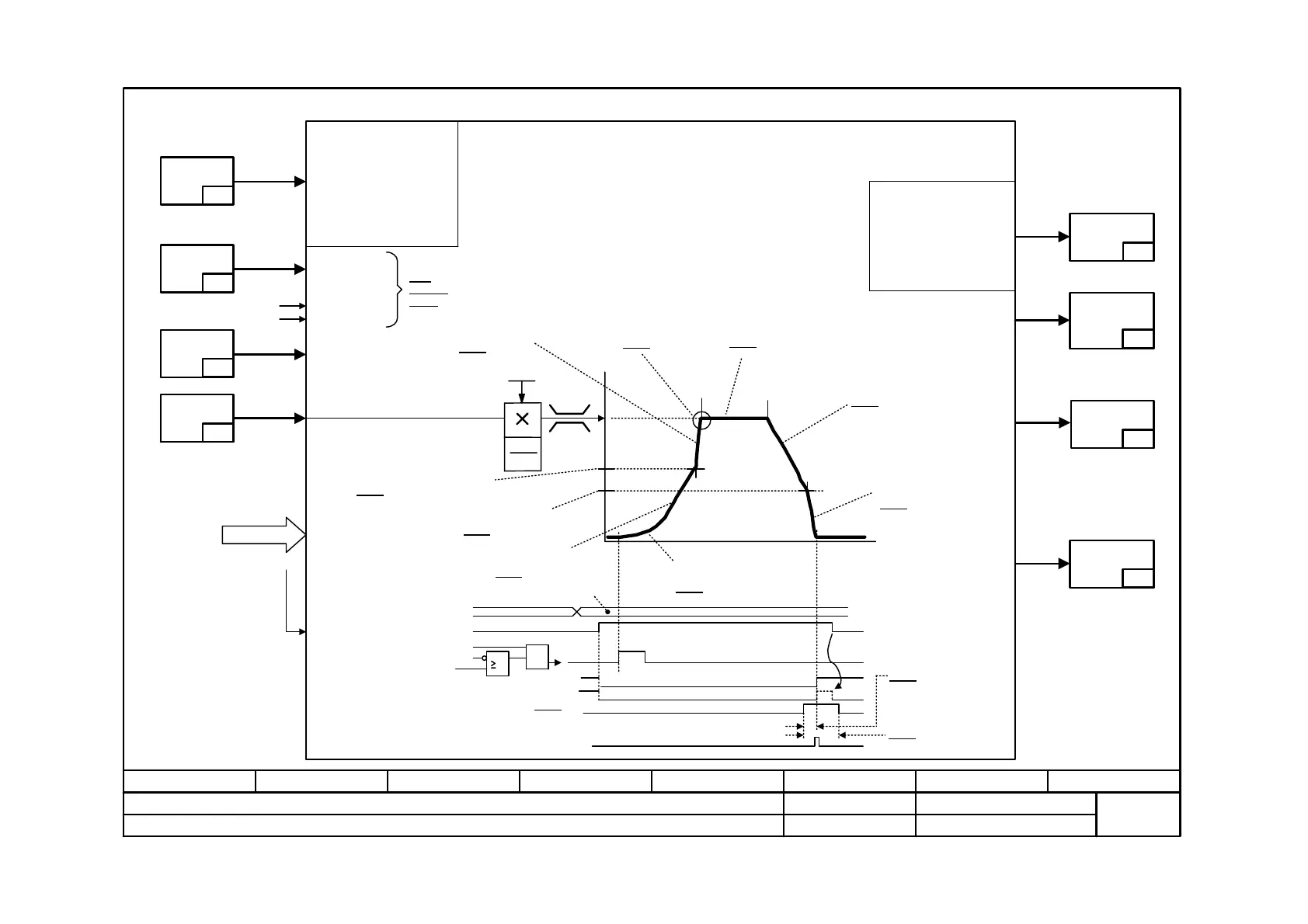
Roll feeding
-830 -
Roll feeding (possible in MDI and automatic modes)
See Function description, Ch. 5.2.2
<1> In the case of loop number
U507=0, any number of feeding
movements can be started without
a 0=>1 edge of the start
command having to be output.
<2> [FUT] is only signalled when
loop counter is used (U507>0)
and loop counter=0 (i.e. when
number of loops reached)
[J_FWD] Forwards
[J_BWD] Backwards
[RST] Reset
(technology)
[FUM] Follow-up mode
[CRD] Cancel remaining
distance
[STA] Start
[RIE] Read-in enable for
roll feeding
MD1 = 3
MD11 > 0
Position
signals
[815]
Behaviour when aborted MD37
Digital inputs for roll feeding
[813.5] MD46
Digital outputs for roll feeding
[813.5] MD48
When MD1 = 3
Block specification
for roll feeding
from MDI [823] and
automatic [826]
U507 Number of loops:
U507=0: Loop counter inactive. After start command, any number of
feeding movements can be started with [RIE];
[FUT] is not output
U507>0: Loop counter active:
After start command, U507 feeding movement can be started with
[RIE]. Completion of the last feeding movement is signalled with [FUT]
n540.36 Loop counter (display of remaining number of loops; counts from U507 to "0";
is set to U507 with start command and decremented for each [DRS])
F (Speed)
X (length)
Acceleration breakpoint -
velocity
1 ... 1 500 000 [x 1000 LU/min]
MD29
(0)
Deceleration breakpoint -
velocity
1 ... 1 500 000 [x 1000 LU/min]
MD30
(0)
Acceleration
1 ... 99 999 [x 1000 LU/s
2
]
MD18
(1000)
Control bits
[809]
Positioning input signals
Operating
mode
[809]
Override
[809]
t
v
100%
F Ovr
*
MD23
Acceleration
overshoot
0 ... 100%
MD36
(0)
Constant travel
time (for capping a
triangular peak)
1 ... 99 999 ms
MD33
(0)
Deceleration
1 ... 99 999 [x 1000 LU/s
2
]
MD19
(1000)
Deceleration breakpoint -
deceleration
1 ... 99 999 [x 1000 LU/s
2
]
MD32
(0)
Acceleration breakpoint -
acceleration
1 ... 99 999 [x 1000 LU/s
2
]
MD31
(0)
Acceleration jerk (jerk
limitation positive)
1 ... 999 999 [x 1000 LU/s
2
]
MD21
(0)
3, 5 or 6
[MODE_IN]
[STA] Start
<2>
Pre-position reached -
lead time 1 ... 99 999 ms
MD34
(0 = inactive)
Pre-position reached -
output time 1 ... 99 999 ms
MD35
(0 = inactive)
&
1
[RIE] Read-in enable
Number of loops U507 = 0
Loop counter > 0
Decrement loop counter n540.36
[DRS] Dest. reached, axis stat.
[FUT] Function terminated
Preposition reached (MD48
[813.3]
[FUT] Function terminated
[BWD] Backwards
[FWD] Forwards
[DRS] Dest. reached, axis
stat.
[FUR] Function running
[ST_EN] Start enable
[TGL_O] Toggle output
Positioning output signals
Status bits
[811]
[815]
Control signals
for position
detection
Diagnostic data
[818]
Setpoints
[817]
Ovr.
<1>
Op. mode
3 = MDI
5 = Automatic
6 =
Automatic,
single block
Roll
feeding
active
V2.5
F [830.2]
 Loading...
Loading...









