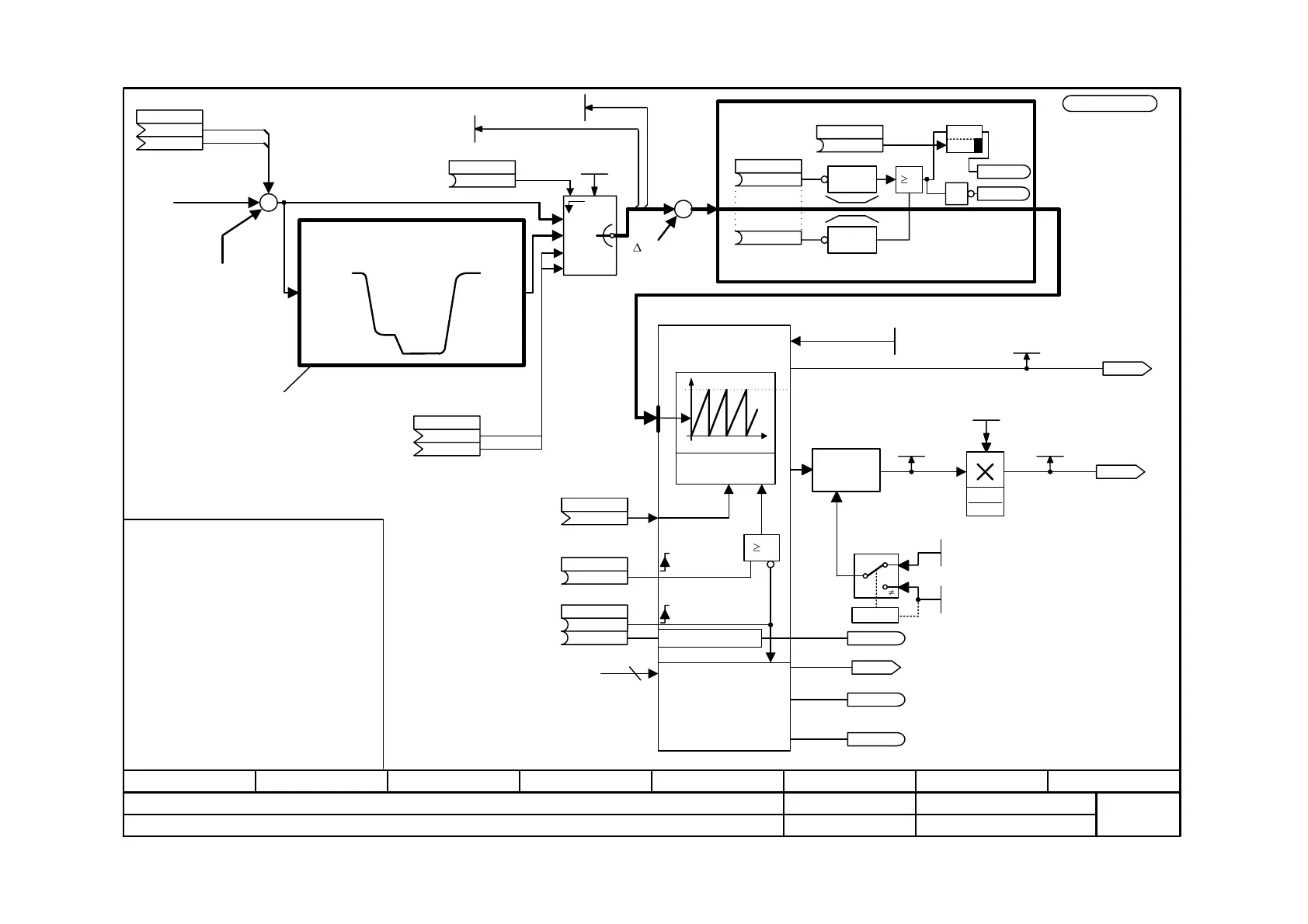
Function diagram
87654321
fp_mc_836_e.vsd
Technology option
MASTERDRIVES MC
02.02.04
Synchronism - generation of position setpoint
-836 -
V2.5
(for sheet [834] ...[843])
see [331.3]
Integrator with
ACL limitation
SET
SET
VALUE
MD11
AZL_S
Speed setpoint slave
in [%] to the position
controller
(P209 = 312 [340.7])
x1 x2
100%
*
MD49
KK0120 = Position actual
value <3> [330.8]
<1>
B0220 =
"Enable position control" [340.5]
[835.8]
Catch-up
(see sheet [837])
Input
catch-up
[837.1]
Output
catch-up
[837.8]
[841.8]
V_displacement of
synchronization and
displacement angle
setting
s_set_Slave
correction action for
position setpoint
from [843.8]
+/-
Correct position actual-value
and limit to ACL axis cycle
length
Corrective action for
position actual-value
from position
correction/referencing
[843.8]
s_set_Slave
Accelerate drive up to
speed of running
machine
<1> With a rising edge, position setpoint output is set
once to the set value.
<2> WEffect of the "Enable synchronism" command:
0 = Synchronism block is not calculated,
KK0310 = set value, all other outputs = 0
1 = Synchronism block is calculated,
at a 0/1 edge, the integrator is set to the set
value (normally to position actual-value)
<3> The examples are applicable if the motor encoder
[330] is used. If an external machine encoder is
used, the corresponding parameters and
connectors on sheet [335] have to be used.
<4> Application example see Chapter 9.4.40
<5> If the new function "Continue synchronism" is
activated via binector input U674.2 the internal
values/statuses are frozen. No internal reset of
values/statuses takes place. Thus when
synchronism is temporarily deactivated it behaves
as if it had never been shut down.
ACL_S
[LU]
1
3
.01 (0) [LU]
+
Scaling
0
0
+
+
.01
–
v > 0
=> v = 0
1
v < 0
=> v = 0
Backstop
1
SQ
R
U607.1
3
2
1
0
2
1
2
0
.01 (0) [LU]
.02 (0) [%]
<4>
<4>
.01
<2> Enable Sync
Continue synchronism
<5> Continue synchronism (FRZ)
KK
U671 (120)
Set value position setpoint output
B
U673 (0)
Set output position setpoint
B (220)
U674
Src. Enable Sync
Slave axis cycle
0 = linear axis
1...999 999 999 LU
U501.11 (4096)
KK0310
Corrected
position setpoint slave
[LU] to position controller
(P190 = 310 [340.1])
U953.33=___ (20)
KK0312
Speed pre-control
Evaluation factor
0...150 %
U501.49 (0)
KK0301
Position correction value KOR
(e.g. P174=301 [330.5] ) <3>
B0303
Correct position +
at underflow etc.
(e.g. P175.01=303 [330.5]) <3>
B0304
Correct position -
at overflow etc.
(e.g. P175.02=304 [330.5]) <3>
n655.1
KK
U461
Src. Add. Offset S.
KK
.02 (0) [%]
Beo [% of P353]
[% x 0.01]
n540.38
MD23
0 ... 19.999.999
U501.23 (12288) [1000
LU/min]
Scaling speed slave [1000 LU/min]
0.00 ... 20.000.000,00
U607.1 (0.00)
[% of scaling]
n653.1
B (1)
U463
Release direction
B (1)
.02
B0812 Backstop memory active
B0813
Backstop currently
not active
B
U676 (0)
Synchronize to master value [841a.1]
Catch-up active
[837.8]
KK
U886
Src Sync local
KK
B
U885
Src Sync local on
B (0)
.02
B0826 Continue synchronism active (FRZ_ON)
Speed setpoint [%]
n653.2
Position setpoint [LU]
n655.2
 Loading...
Loading...









