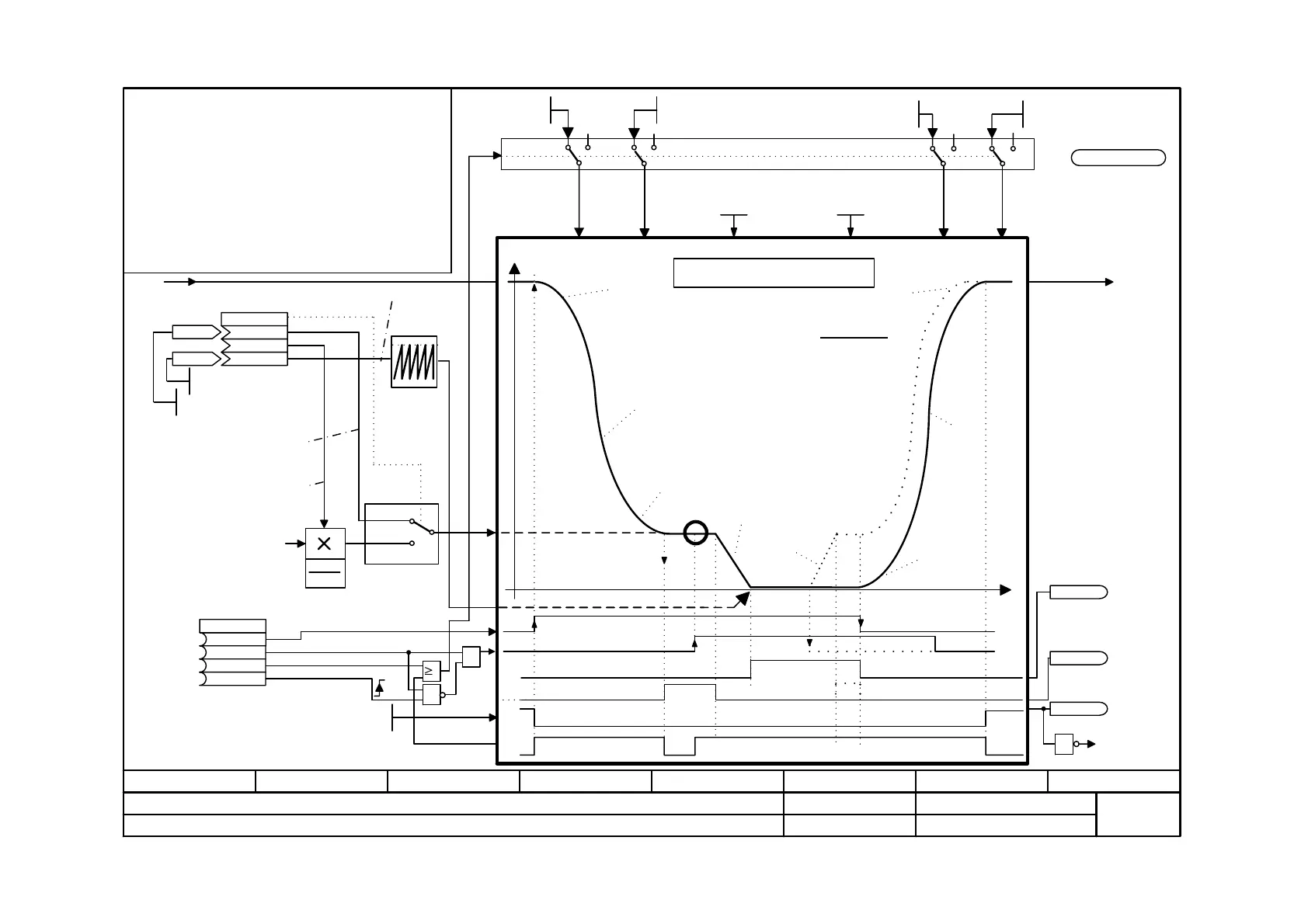
Function diagram
87654321
fp_mc_837_e.vsd
Technology option
MASTERDRIVES MC
01.07.03
Synchronism - catch-up
-837 -
V2.5
.01 (802)
AZL
V
t
DECEL 1 ROUND_D ACCEL 1 ROUND_A
ROUND_D
ROUND_D
DECEL 1
ACCEL 1
ROUND_A
ACCEL 2
10
Halt position [LU]
Setpoint speed catch-up
[10 LU/min]
(effective if U626.03=0)
Setpoint speed
catch-up [%]
[836.2]
Catch-up input
[836.4]
0
10
0
10
0
10
0
Catch-up output
x1 * x2
100%
x1
x2
Setpoint speed catch-up
[10 LU/min]
U626.02 =0
U626.02>0
.01
0=catch-up
1=halt
Enable positioning
ROUND_A
Halt position
1 [836.4]
Catch-up active
<1>
<2>
<3>
<4>
DECEL 2
<2>
<2>
<4>
<1> The axis is first traveled at "catch-up setpoint speed" until the halt
position in the required direction of rotation can be approached.
If the position is to be reached in the forward direction, a positive
speed setpoint must be input.
If the position is to be reached in the reverse direction, a negative
speed setpoint must be input.
<2> with intermediate approach of setpoint speed
<3> without intermediate approach of setpoint speed
<4> After completion of catch-up, the angular synchronism must be
explicitly established, e.g. by linking the message "Catch-up finished"
with the command "Synchronize master value" (U676=820[841.2]).
This causes a compensating movement if catch-up is not selected as
a mode (U602=3).
<5> Mode: 1= With ramp-up/ramp-down
0 = Without ramp-up/ramp-down
(801)
(for sheet [834] ...[843])
Catch-up
(Accelerate the drive to the
speed of the running machine)
Mode <5>
DECEL 2
ACCEL 2
[CU_PR]
[CU_VR]
[CU_TE]
[CU_SP]
[CU_EN]
[CU_DR]
0 = Rounding does not take effect on
sudden reduction of the input value
during ramp-up
1 = Rounding always takes effect.
[CU_TR]
Trig. stop position
transfer
1
&
&
Ramp can be switched off
<6> Value range for accelerations
(up, down) 0.00...20 000 000.00
(-1): DECEL 2 =
DECEL 1
(-1): ACCEL 2 =
ACCEL 1
Scaling rate
V_max
KK
U626
Catch-up setpoints
KK
.02 (0)
KK
.03
KK0802
KK0801
B (0)
U625
Control word catch-up
B (0)
.02
B (1)
.03
B0822
Setpoint speed of
catch-up
reached
B0821
is positioned
B0820
Catch-up
finished
U953.33=___ (20)
Deceleration
<6> [x 1000 LU/s2]
U628.1 (204.00)
Rounding time
Deceleration 0...6000 ms
U627.1 (1000)
Rounding mode
U649(0)
B (0)
.04
U688.01 (0)
U688.02 (0)
Acceleration speed
[x 1000 LU/s
2
]
U628.2 (204.00)
Deceleration
[x 1000 LU/s2]
U628.3 (-1)
Acceleration speed
[x 1000 LU/s2]
U628.4 (-1)
<6>
<6>
<6>
Rounding time Acceleration
0...6000 ms
U627.2 (1000)
 Loading...
Loading...









