08.2012 Parameterizing Steps
Siemens AG 6SE7087-6QX70 (Version AN)
SIMOVERT MASTERDRIVES Compendium Motion Control 6-29
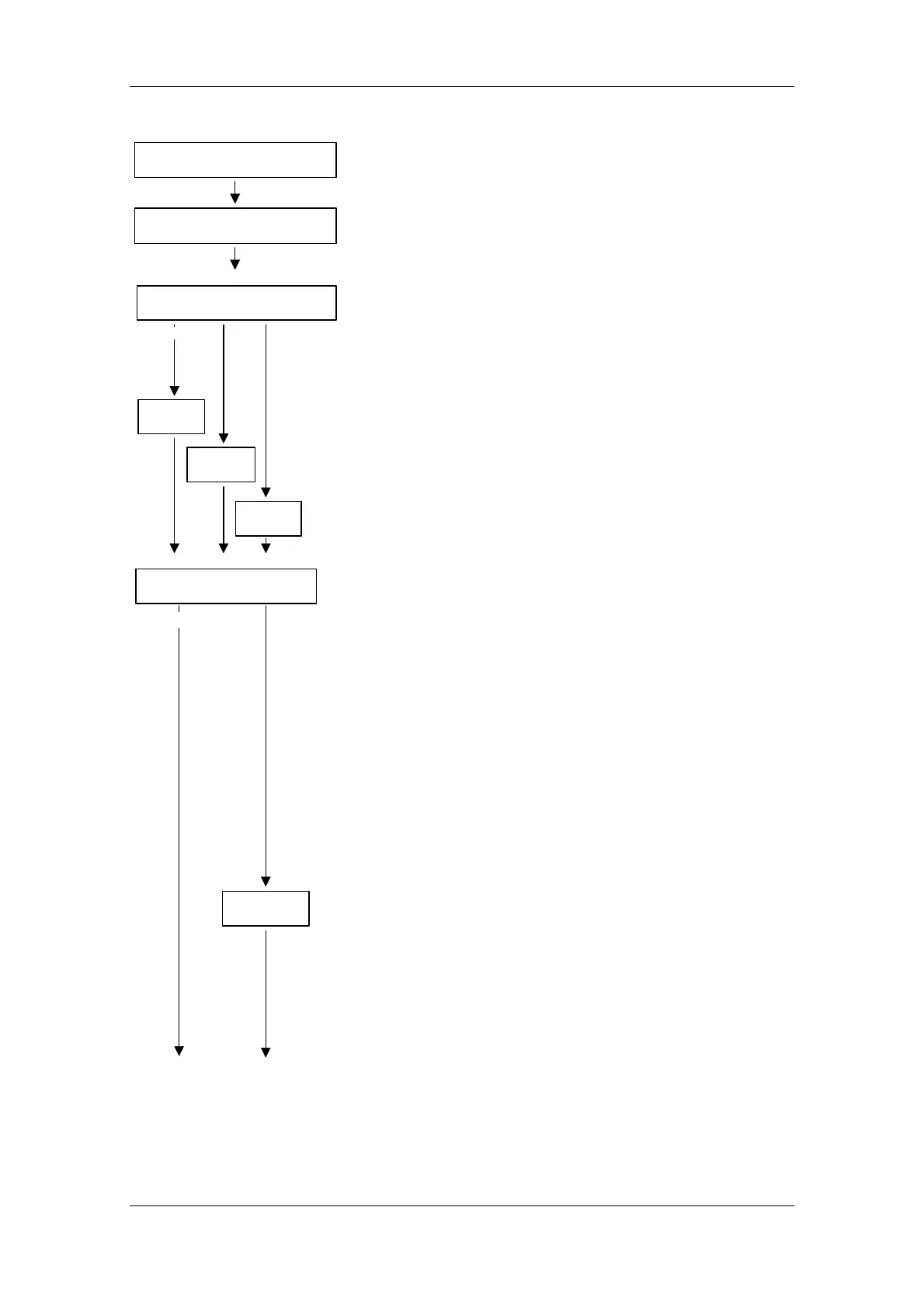
P071 = ?
Input of unit line voltage in V
AC Units: RMS value of AC voltage
DC Units: DC link voltage
P060 = 3
Select "Quick Parameterization" menu
P095 = ?
Input of motor type
0: No motor connected
1: 1FT6/1FK6 synchronous servo-motor
2: 1PH7(=1PA6)/1PL6/1PH4 induction servo-motor
5: Torque motor 1FW3
2
Input the code number for the connected 1FK6/1FT6 motor (see
attached list)
Input the code number for the connected 1PH7(=1PA6), 1PH4,
1PL6 motor (see attached list)
P096 = ?
P095 = 1
P097 = ?
5
P099 = ?
Input the code number for the connected 1FW3 motor
(see attached list)
P130 = ?
Select motor encoder
0: automatic encoder detection
1: 2-pole resolver
2: Resolver with pole pair number of motor
3: Sin/cos encoder 2048/rev.
4: Multiturn encoder 2048/rev.
5: Pulse encoder 1024/rev.
6: Pulse encoder not in Slot C (SBP)
7: Encoders without C/D track 2048/rev
(SW V1.30 and later)
0, 1, 2, 3, 5, 6, 7 4
P147.1 = ?
Selection of a multiturn enocder
1: EQN1325 (2048 lines)
2: ECN1313 (2048 lines)
6: EnDat autom.
7: EQI1325 (32 lines)
8: EQN1125 (Heidenhain) EnDat
9: ECN1113 (Heidenhain) EnDat
10: ROQ424 SSI
11: EQI1125 (Heidenhain) EnDat
The absolute initial position is not set on encoders without
a C/D track. These can only be used on asynchronous
machines. The position is corrected via a zero pulse (if
connected).
1PA6, 1PL6, 1PH4 and 1PH7 asynchronous motors with
encoder:
These motors are normally supplied with an ERN1381
encoder without C/D track.
 Loading...
Loading...









