Communication / PROFIBUS 09.2008
6SE7087-6QX70 (Version AK) Siemens AG
8.2-92 Compendium Motion Control SIMOVERT MASTERDRIVES
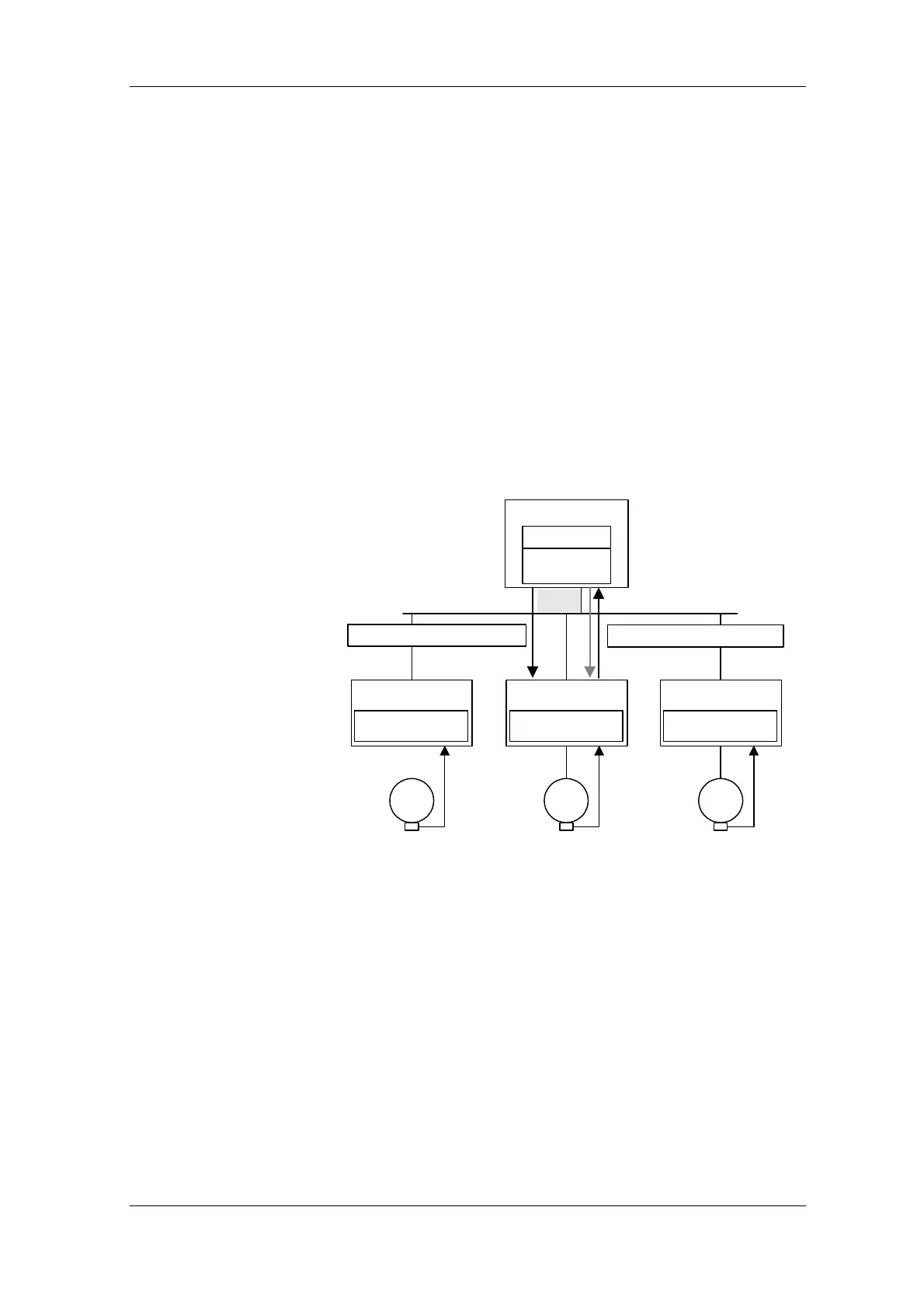
Application class 4
Application class 4 (Figure 2) handles the position control through
PROFIBUS-DP. Drive applications for handling equipment and robot
applications often require a coordinated motion cycle by several drives.
The motion control is mainly implemented via a central automation unit
(NC). These controls calculate special setpoint profiles for each drive, so
that certain tracks can be travelled through the combined action of
several drives (for example for the XYZ axis). The automation system
comprises not only the necessary technology functions for the
automation process but also the functions for interpolation and position
control of the drive. Speed setpoints and actual values and actual
position values are exchanged via PROFIBUS-DP. The drive controller
essentially only comprises the algorithms for speed control and recording
of actual position values. As position control is carried out via the bus
system, this variant places very high demands on the clock
synchronisation of the bus system.
To increase the stiffness and dynamism of the control circuit, the DSC
functionality can be used additionally.
Clock
pulse
Automation
Interpolation
pos. control
Control word + speed setpoint + ...
Status word + pos.act.value + ...
Drive
Closed-loop speed
control
M M M
Encoder
Technology
Drive
Closed-loop speed
control
Drive
Closed-loop speed
control
Clock
synchronization
Encoder Encoder
Fig. 8.2-29 Application class 4
Positioning with
central interpolation
and position control
(standard telegram 3
to 6)
 Loading...
Loading...









