Communication / CBC 03.2010
6SE7087-6QX70 (Version AL) Siemens AG
8.4-36 Compendium Motion Control SIMOVERT MASTERDRIVES
P712 (CB parameter 2) P697 (CB parameter 2)
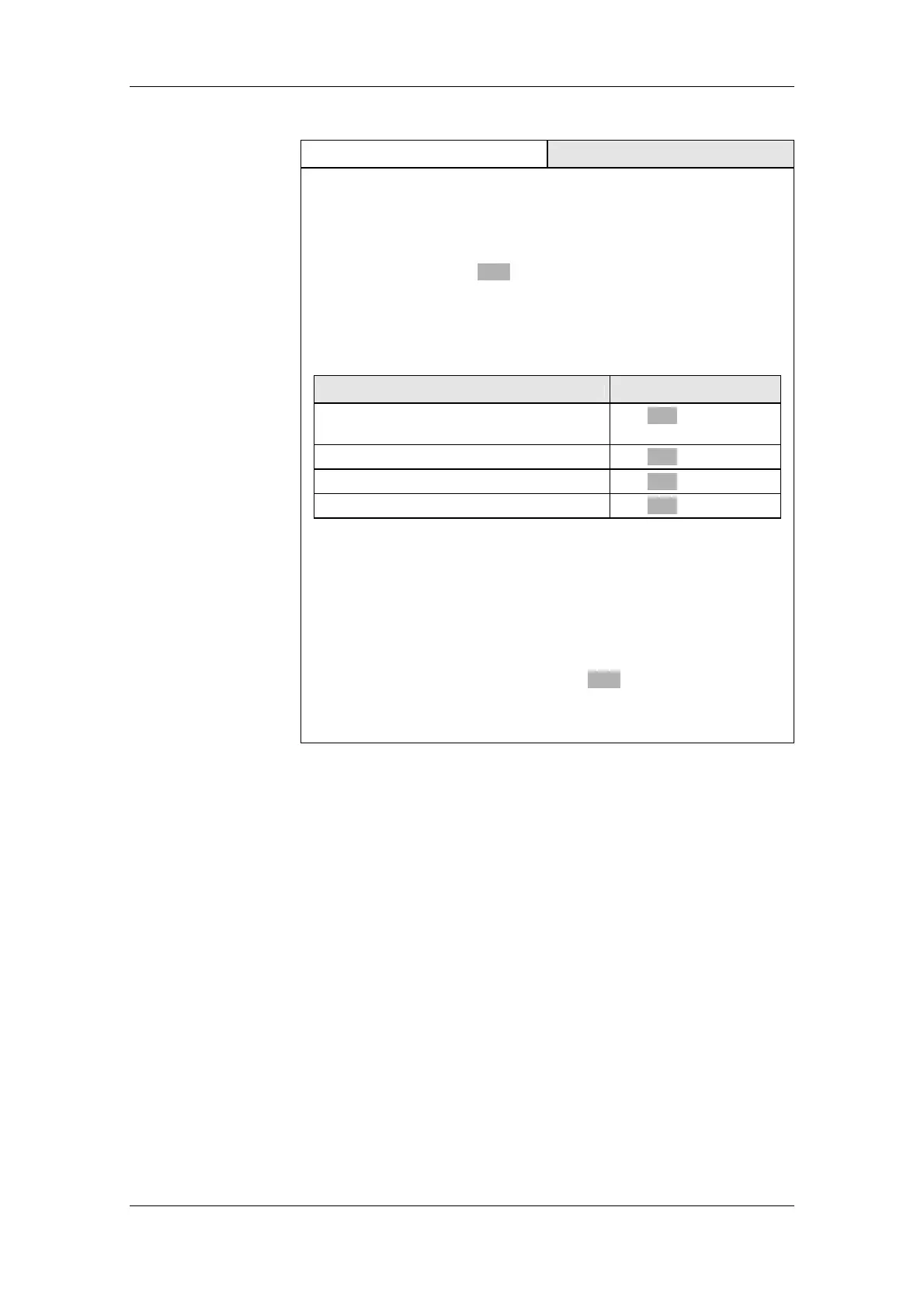
Basic identifier for PZD receive (receiving process data)
With this parameter, the basic identifier for PZD receive (receive process data
= setpoints / control words) can be set. The actual CAN identifier for PZD
receive is calculated from this parameter and the node address (P918)
according to the following equation:
(Parameter value of P712 / P697) + (Parameter value of P918)*4
Because only four setpoints (= 8 bytes) can be transferred with a CAN data
telegram but sixteen setpoints are supported by MASTERDRIVES units, a
total of four CAN data telegrams with four CAN identifiers are needed for
transferring setpoints. The following three CAN identifiers are therefore also
provided for PZD receive. The following table applies:
Contents CAN identifier
Control word 1 / Setpoint 2 / Setpoint 3 / Setpoint 4
or Control word 2
P712/P697 + P918*4
Setpoint 5 to Setpoint 8
P712/P697 + P918*4 + 1
Setpoint 9 to Setpoint 12
P712/P697 + P918*4 + 2
Setpoint 13 to Setpoint 16
P712/P697 + P918*4 + 3
With the value 0 (pre-assigned) in this parameter, PZD receive is deactivated.
If the calculated CAN identifier for PZD receive is outside the valid range (1 to
2000) or if it overlaps another CAN identifier, error F080 appears when status
4 (hardware configuration) is left. After acknowledgement of the error, you are
in the "hardware configuration" status again and can correct the incorrect
parameterization.
Example:
The basic identifier for PZD receive in P712 / P697 is set to 500. The node
address in P918 is 50. This results in a CAN identifier of 500 + 50*4 = 700 for
the first CAN data telegram of PZD receive. The further CAN data telegrams
for PZD receive have CAN identifiers 701 to 703.
 Loading...
Loading...









