02.2004 Communication / CBC CANopen Communication Board
Siemens AG 6SE7087-6QX70 (Version AD)
SIMOVERT MASTERDRIVES Compendium Motion Control 8.5-73
Please note that parameters MD45 and U536 must be adapted to the
relevant hardware. When a homing method is selected, parameters
P183, U501.05, U501.08 and U502 are assigned in the order given. J-
FWD and J-BWD are set, depending on the homing method, in the
control word when bit start_homing is set. Zero is selected as the
homing method when the MASTERDRIVES boots. When bit
start_homing is set in the control word, J-FWD and-BWD are set
simultaneously. This is a way of avoiding the need to write object 6098h
prior to every homing operation.
The object homing_method cannot, however, be set to zero. Any
attempt to do so generates an abort message.
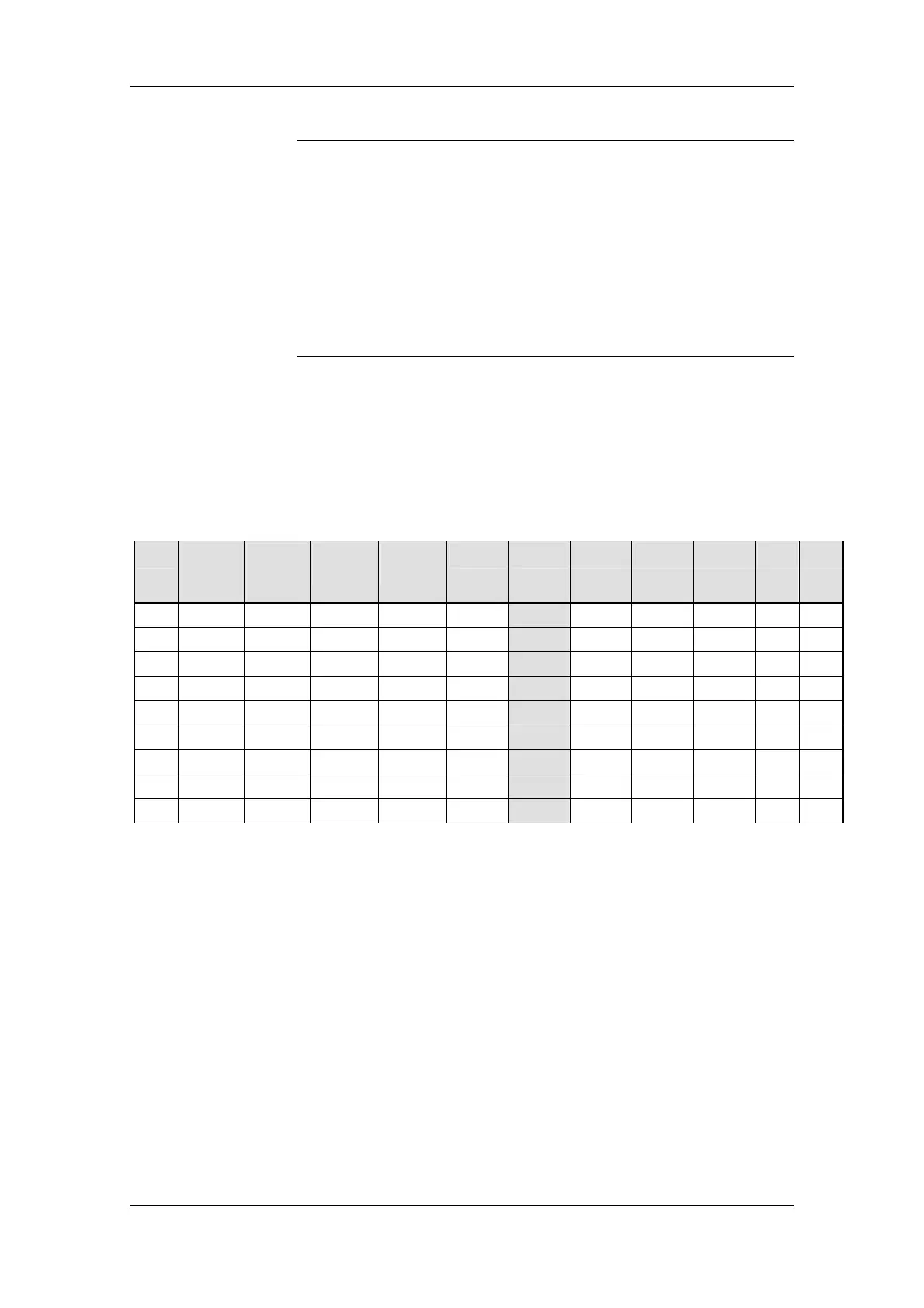
The following table shows the values of the parameters assigned when
a homing method is selected.
On a MASTERDRIVES MC, all parameters with parameter tasks are
written to the EEPROM. If the homing method remains unchanged,
object 6098h does not need to written every time the system boots. The
parenthesized parameters are addressed via an OR connection. Refer
to the function diagrams for exact interconnection details.
Mode U274.03
(U866.06)
D-FWD
U275.03
(U866.07)
D-BWD
U245
(U866.11)
U246
(U866.12)
U875.10 P648.01 U878.01 U878.02 U878.03 P172 P173
17 0 1 18 0 0 4 - B220 - - -
18 1 0 0 18 1 4 - B220 - - -
19 1 0 0 18 1 4 - B220 - - -
21 0 1 18 0 0 4 - B220 - - -
23 1 0 0 12&18 1 4 - B220 - - -
26 1 0 18 12 0 4 - B220 - - -
27 0 1 10 and18 0 0 4 - B220 - - -
30 0 1 10 18 1 4 - B220 - - -
35 - - - - - - 556 B220 627 880 3200
All available methods are described below. Any methods not described
are not supported by the MASTERDRIVES.
On a MASTERDRIVES MC without technology board, only the homing
methods listed in the table above can be selected.
NOTE
Homing with MC
 Loading...
Loading...









