02.2004 Communication / CBC CANopen Communication Board
Siemens AG 6SE7087-6QX70 (Version AD)
SIMOVERT MASTERDRIVES Compendium Motion Control 8.5-117
Position controller output [340.8]
87654321
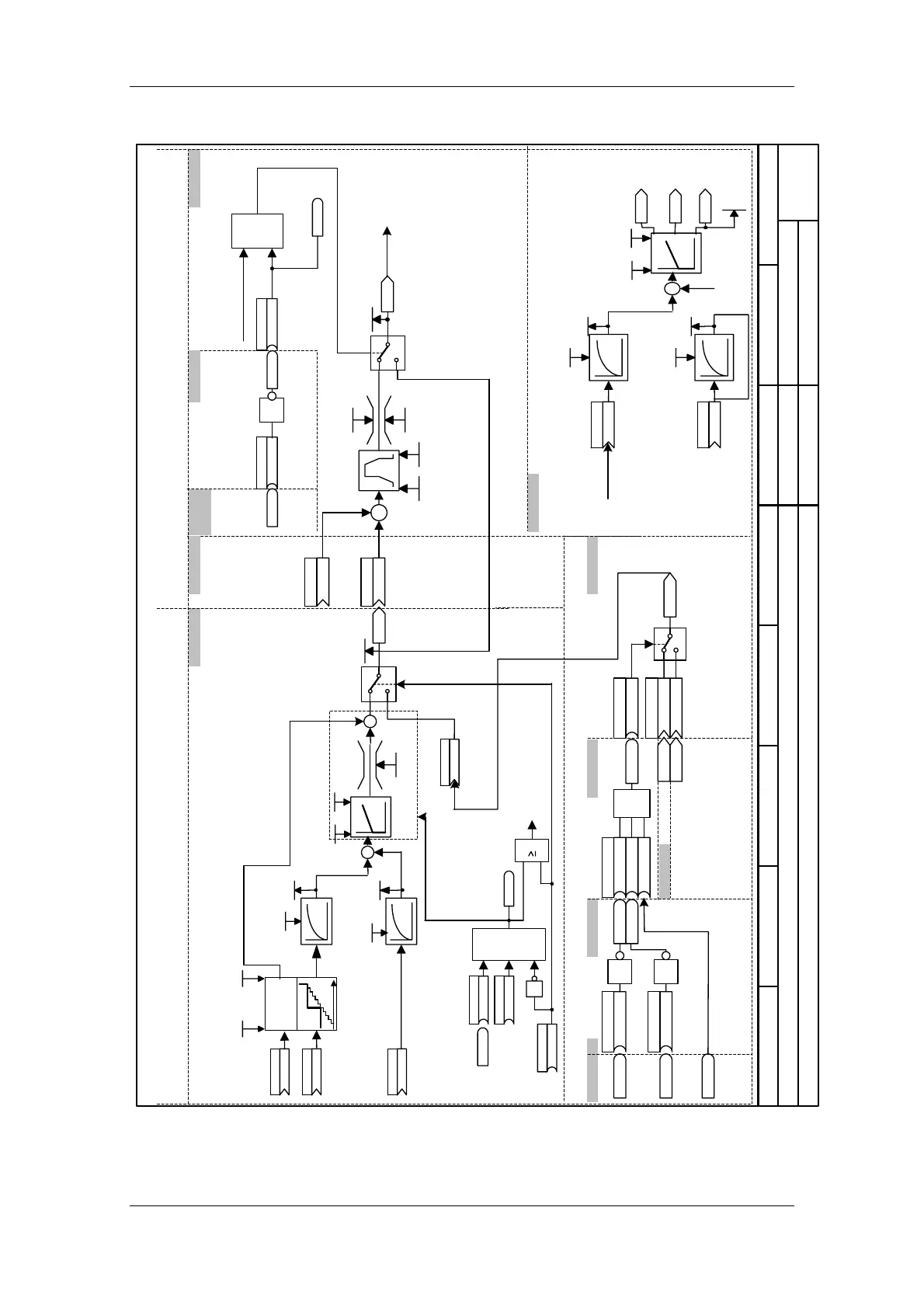
Overview: Interconnection for CANopen
MASTERDRIVES MC
- 8510 -
from V1.5
24.11.03
MASTERDRIVES MC F01
Speed controller
+
–
P220.B(75)
KK
Src n(set)
Smooth n(set)
0.0 ... 100.0 ms
P221.F (0.0)
P222 (91)
KK
Src n(act)
Smooth n(act)
0.0 ... 100.0 ms
P223 (0.0)
[rev/min]
n(act,smooth)
r230
[rev/min]
n(set,smooth)
r229
K0154
n-Reg (P comp.)
K0155
n-Reg (I comp.)
K0153
M(set, n-Reg.)
M(set,n-Reg.)
r255
n-Reg Time
0 ... 1000 ms
P240.F (50)
n-Reg. Kp1
0.0 ...1000.0
P240.F (10.0)
Sheet [340]
Position controller
KK0530
B0618
.01
B3214
Mode In 2
2
Speed setpoint switchover when not controlled by technology board
1) The user is free to choose
free blocks. The sketch only
illustrates the mandatory
interconnection of blocks..
1
B0649
1
B0650
B3212
Mode In 2
0
B3213
Mode In 2
1
Sheet [8509] Sheet [765]
KKxxxx*
U259 (0)
B
U260 (0)
B
U238 (1)
&
B
B
B
.02
.03
Sheet [770]
.01
U184 (0)
KK
U185 (0)
B
.02
KK
0
1
KK0311
Sheet [817]
1) 1)
If the setpoint for open-loop control
is mapped via a PDO, the
appropriate connector must be wired
from the dual port RAM.If the
setpoint is written only via an SDO
communication, KK418 must be
wired (see section 8.5.1).
KK0131
+
–
Smooth Pos Set
0.0 ..1000.0 ms
P191.F (0.0)
P194 (120)
KK
Src Pos ActV
Act. pos. smoothing
0.0... 1000.0 ms
P195 (0.0)
Pos ActV
PosReg
r201
Pos Setp
PosReg
r200
Pos Reg Time
0 ..10000 ms
P206.F (0)
Pos Reg Kv
0.000..20.000
P204.F (0.100)
[LU]
P190 (310)
KK
Src Pos Setp
Setpoint
position
interpolator
t
Speed ratio
scanning time
-8 ... 8
P770 (3)
Max. step change
for interpolation
0 ... (2
31
-1)
P771 (0)
SR=2
P770
[LU]
Pos Reg Output
r214
P202.B (134)
SrcPosRegLim
0
1
+
+
P209 (312)
KK
PREPosReg
P212 (311)
KK
Src Ctrl Setp
P213 (305)
B
Src Release Ctrl
1
&
P211 (104)
B
Src2 Rel PosReg
P210.B (0)
B
Src1 Rel PosReg
B0220
Pos Reg. Enable
Enable
This block is calculated
only after enabling
[817.6]
1
Enable RFG bypass by
position control [320.6]
Vset reference
Setpoint channel
P443.B
KK
Src MainSetpoint
P433.B (0)
KK
Src AddSetpoint1
Sheet [320]Sheet [310]
Reference
frequency: P352
Speed: P353
Torque: P354
P462.F (10 s)
Accel. Time
P464.F (10 s)
Decel. Time
P453.F (-110.0%)
n(max,neg.DR)
n(max,pos.DR)
P452.F (110.0%) *
)
0
1
n/f(set)
r482
KK075
1)
Sheet [750]
From setpoint channel
Sheet 320
Sheet [360]
To speed controller
Sheet 360
B0001
FixB.1
Sheet [770]
B0648
Mode In
Control
inverted
Enable RFG bypass
by pos. control [340.5]
B0205
Position controller enable
by RFG bypass
&
P772 (1)
B
SrcEnRGenByp
U248 (0)
B
Mode In
Invert
control
B0618
Mode In
Control
Sheet
[8510.3]
1
 Loading...
Loading...









