02.2004 Communication / CBC CANopen Communication Board
Siemens AG 6SE7087-6QX70 (Version AD)
SIMOVERT MASTERDRIVES Compendium Motion Control 8.5-121
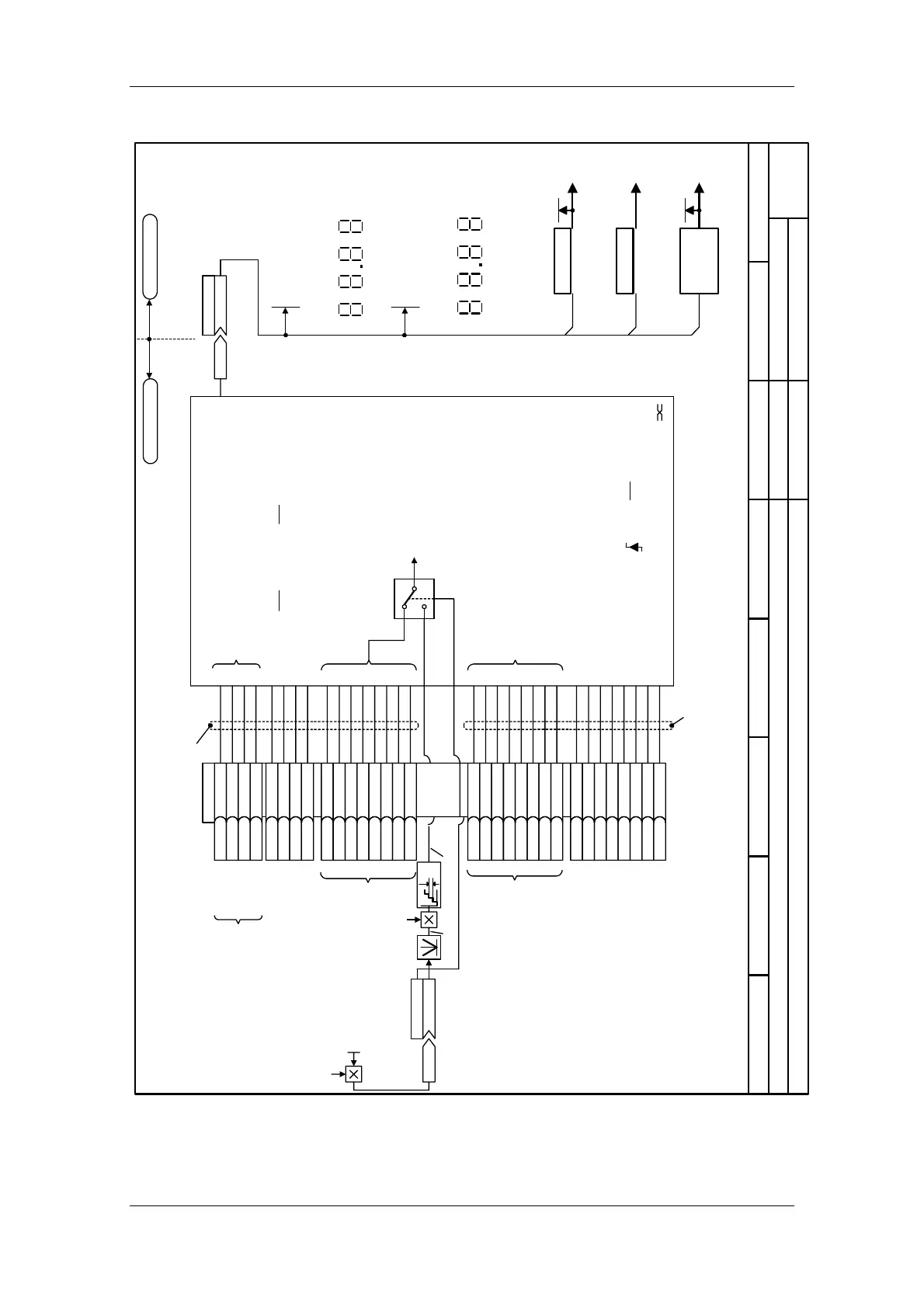
Function diagram
87654321
CANopen control word and modes of operation to MASTERDRIVES positioning control word
MASTERDRIVES MC
01.10.01
MASTERDRIVES MC F01
- 8514 -
<4> Mode change is also possible in
special cases during travel: the
drive then brakes via MD19 or
MD42. After the starting enable is
received [ST_EN] the new motion
can be started.
<3> Checkbacked mode: [MODE_OUT]: see n540.15 [811.3]
<2> Examples for generation of positioning control signals:
- U530=3032: Comm. Board CBx, Words 2 and 3 [120.6]
- U530=860 :Bit-wise generation via positioning control word [809.3]
<1> or specification of direc. of rot. during MDI rotary axis positioning via G90 function (00 = "travel shortest distance")
recommended: U953.30 = 4, (only insert if KK860 is used)
U953.30 = ___(20)
U953.32 = ___(20)
recomm:
U953.32 = 4
Forming the positioning control signals
U710
B
.32 (0) Bit 31
B
.31 (0) Bit 30
B
.30 (0) Bit 29
B
.29 (0) Bit 28
High Word
B
.28 (0) Bit 27
B
.27 (0) Bit 26
B
.26 (0) Bit 25
B
.25 (0) Bit 24
B
.24 (0) Bit 23
B
.23 (0) Bit 22
B
.22 (0) Bit 21
B
.21 (0) Bit 20
B
.20 (0) Bit 19
B
.19 (0) Bit 18
B
.18 (0) Bit 17
B
.17 (0) Bit 16
B
.16 (0) Bit 15
B
.15 (0) Bit 14
B
.14 (0) Bit 13
B
.13 (0) Bit 12
B
.12 (0) Bit 11
B
.11 (0) Bit 10
B
.10 (0) Bit 9
B
.09 (0) Bit 8
B
.08 (0) Bit 7
B
.07 (0) Bit 6
B
.06 (0) Bit 5
B
.05 (0) Bit 4
B
.04 (0) Bit 3
B
.03 (0) Bit 2
B
.02 (0) Bit 1
B
.01 (0) Bit 0
2
3
2
2
2
1
2
0
<4> MODE_IN operating mode preselection (can only be changed
at standstill)
Low Word
0 = no mode 4 = Control
1 = Setup 5 = Automatic positioning
2 = Homing 6 = Automatik single block
3 = MDI (point-to-point 11 = Syncrhonism
positioning)
KK0860
Positioning
contr.word
U530 (860)
KK
Control signals
positioning
<2>
OVERRIDE
0 ... 255 = 0 ... 255 %
(64h = 100d = 100 %)
0
>0
1.275
0 ... + 255 %
OVERRIDE
Speed override
0 ... 255
2
7
2
6
2
5
2
4
2
3
2
2
2
1
2
0
2
7
2
6
2
5
2
4
2
3
2
2
2
1
2
0
[MDI_NO] (MDI number for MDI)
[PROG_NO] (Program number for automatic mode
[J_FWD] Jog forwards (Jog ForWarD) <1>
[F_S] Fast / Slow (Fast / Slow) for setup / homing
[J_BWD] Jog backwards (Jog BackWarD) <1>
[BLSK] Skip block (BLock SKip)
[SIST] Single step (SIngle STep)
[RST] Reset Technology (ReSeT)
[FUM] Follow-up mode (Follow-Up Mode; s_set:=s_act)
[ACK_M] Acknowledge M function (ACKnowledge M-function)
[CRD] Clear remaining distance (Clear Remaining Distance)
[STA] Start (Start / Stop positioning travel
[RIE] Read-in enable (Read-In Enable)
[TGL_I] Toggle bit Input (flying MDI block change)
(Factory setting: U708 = 100 ==>
OVERRIDE to n540.11 = 100 %)
High Word
n541.02
Low Word
n541.01
31 30 29 28 27 26 25 24
23 22 21 20 19 18 17 16
Display on PMU
15 14 13 12 11 10 9 8
7 6 5 4 3 2 1 0
Display on PMU
Override
Control bits
Mode
To operating modes
Bits 28 ... 31
0 ... 15
24 ... 27
Bits 16 ... 23
MODE_IN
n540.14
n540.11
<3>
B3215Mode In 2
3
B3214Mode In 2
2
B3213Mode In 2
1
B3212Mode In 2
0
B3211Mode spec.
B3210Mode spec.
B3209Mode spec.
B3208<7>[BLSK]
B3207
B3206
B3205
B3204
B3203
B3202
B3201
B3200
B3307
B3306
B3305
B3304
B3303
B3302
B3301
B3300
B3315
B3314
B3313
B3312
B3311
B3310
B3309
B3308
Fixed override
0 ... 255 %
U708 (100)
K0859
U709 (859)
K
External speed
override
0 ... 200 %
0.781
0 ... + 200 %
1 %
<5> Bits only have to be wired if
Automatic Single Block Mode,
Automatic Position Mode are used
<6> Bits can only be changed via object
6060h and not via
object 4040h.
<6>
2
7
2
6
2
5
2
4
2
3
2
2
2
1
2
0
<7> Function via object 4040h.
<7>OVERRIDE
0 ... 255 = 0 ... 255 %
(64h = 100d = 100 %)
2
7
2
6
2
5
2
4
2
3
2
2
2
1
2
0
<7>[MDI_NO] (MDI number for MDI)
[PROG_NO] (Program number
for automatic mode
<7>[SIST]
<7>[RST]
<7>[FUM]
Mode spec
<7>[RIE]
Mode spec
<7>[CRD]
<7>[ACK_M]
from V1.5
 Loading...
Loading...









