08.2012 Technology Option F01
Siemens AG 6SE7087-6QX70 (Version AN)
SIMOVERT MASTERDRIVES Compendium Motion Control 9-27
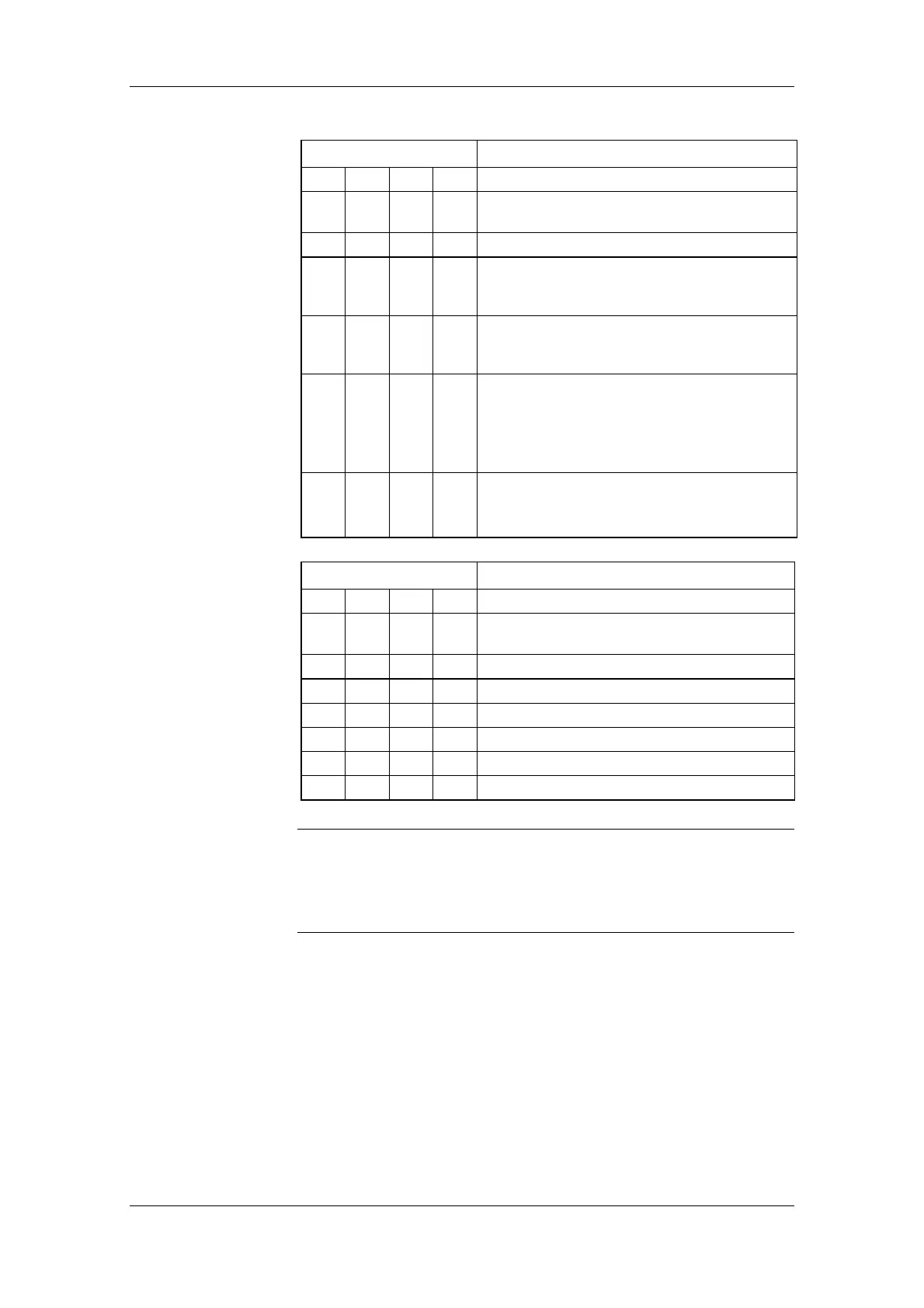
P149.2 EnDat Configuration
T H Z E Thousands, Hundreds, Tens, Ones
X X Z Z
Number of data bits (EnDat)
(e.g. 25 for EQN 1325)
X 0 X X Read measured values (EnDat)
X 3 0 X
Write parameters into encoder EEPROM
EQN1325 (EnDat) (address in P149.4 and
P149.5; value in P149.6)
X 4 X X
Read parameters from encoder EEPROM
EQN1325 (EnDat) (address in P149.4 and
P149.5; value in P149.6)
X A X X
Self-startup (EnDat)
(protocol length; read encoder type and number
of lines from encoder EEPROM and assign P148;
P149 accordingly => only if EnDat protocol
selected in P149.1!)
X B X X
Save zero offset on encoder (EnDat)
(save the zero offset from P146.1 in the encoder
EEPROM and clear P146.1)
P149.3 SSI Configuration
T H Z E Thousands, Hundreds, Tens, Ones
X X X Z
Number of non-significant leading zero bits in the
protocol (SSI)
X X 0 X Data of encoder in binary format (SSI)
X X 1 X Gray-coded encoder data (SSI)
X 0 X X No alarm bit (SSI)
X Z X X Position of alarm bit after last protocol bit (SSI)
0 X X X No parity bit (SSI)
1 X X X Parity check (last protocol bit) (SSI)
In addition to the serial protocol, the motor encoder must also have a
1 Vpp output, since the motor controller requires the motor position in
real time. The serial protocol can only achieve very low sampling rates
and is thus not suitable at present for motor control. The standard
encoder is the Heidenhain EQN1325 with the EnDat protocol.
NOTE
 Loading...
Loading...









