Technology Option F01 08.2012
6SE7087-6QX70 (Version AN) Siemens AG
9-80 Compendium Motion Control SIMOVERT MASTERDRIVES
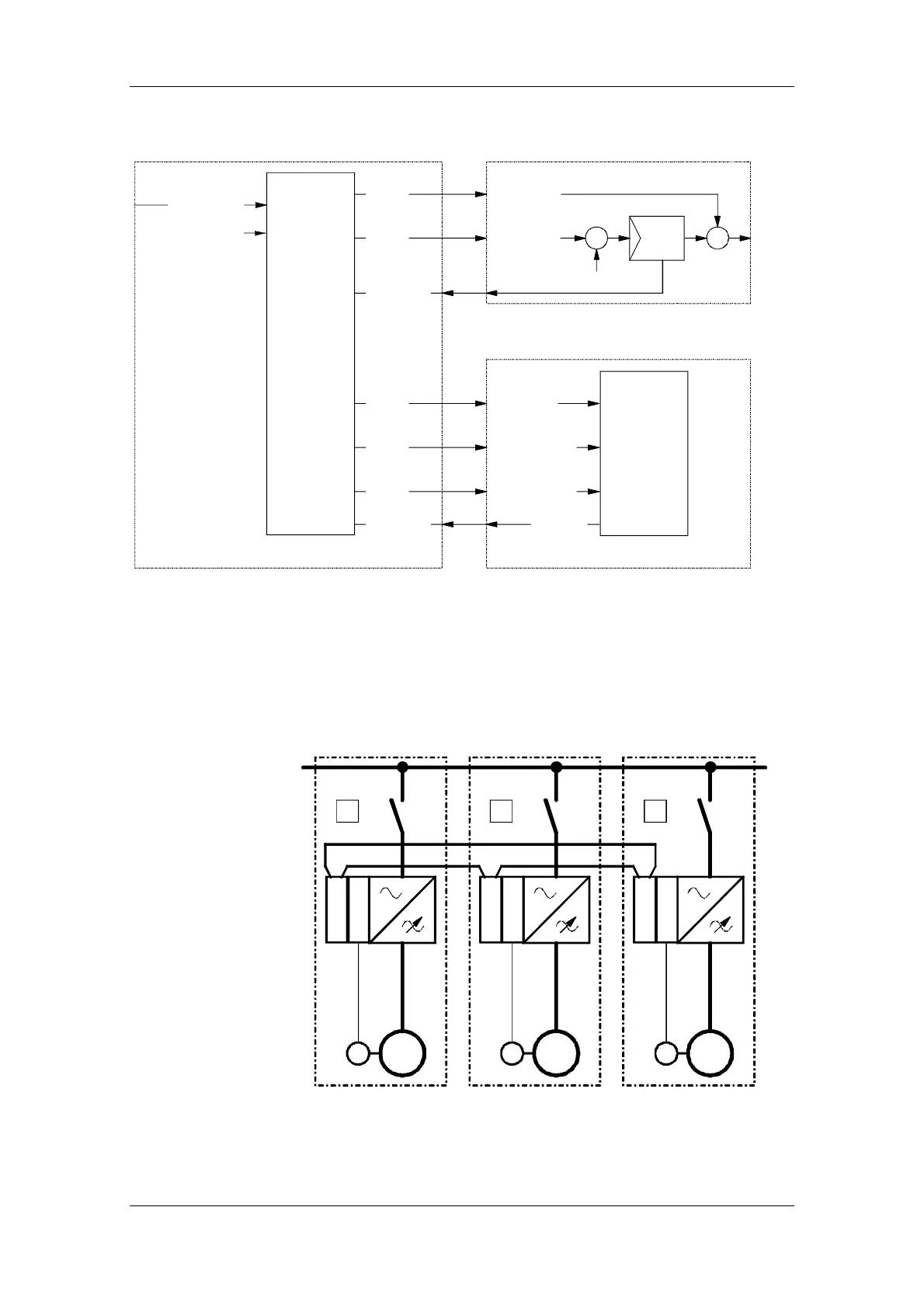
Position controller [340]
Motor encoder position sensing
[330]
Synchronization block [834, ...]
Speed precontrol
Position setpoint
P190=310
P209=312
KK312
KK310
Position
correction value
P174=301
KK301
Position correction +
P175.1=303
B303
Position correction -
P175.2=304
B304
KK120
U671=120
Actual position
EN
U674=220
Enable
synchronization
U600=7031
Master axis
path setpoint [834.1]
[836]
[836]
U600.4=7032
Optional:
speed setpoint
master axis [834.1]
Fig. 9-30
Synchronization of 3 drives with SIMOLINK.
The example shows the main application for synchronization via
SIMOLINK. Drive 1 is the master drive with the virtual master axis.
Drives 2 and 3 are synchronized with drive 1.
CU
M
3~
SLB
M
3~
M
3~
SIMOLINK
Master drive Slave drive 1 Slave drive 2
123
CU
SLB
CU
SLB
Fig. 9-31
Example
 Loading...
Loading...









