06.2005 Engineering Information
Siemens AG 6SE7087-6QX70 (Version AE)
SIMOVERT MASTERDRIVES Compendium Motion Control 11-15
In order to calculate the rms torque, the motor torque must be
determined in all parts of the travel curve. The following formula is used
to calculate the rms torque and the mean motor speed:
M
Mt
T
eff
i
Mot i
=
⋅
∑
2
∆
n
nn
t
T
mean
Mot A Mot E
i
=
+
⋅
∑
2
∆
T Cycle time
M
Mot i
Motor torque in time segment ∆ t
i
nn
Mot A Mot E
+
2
Mean motor speed in time segment ∆ t
i
(A: initial value, E: final value)
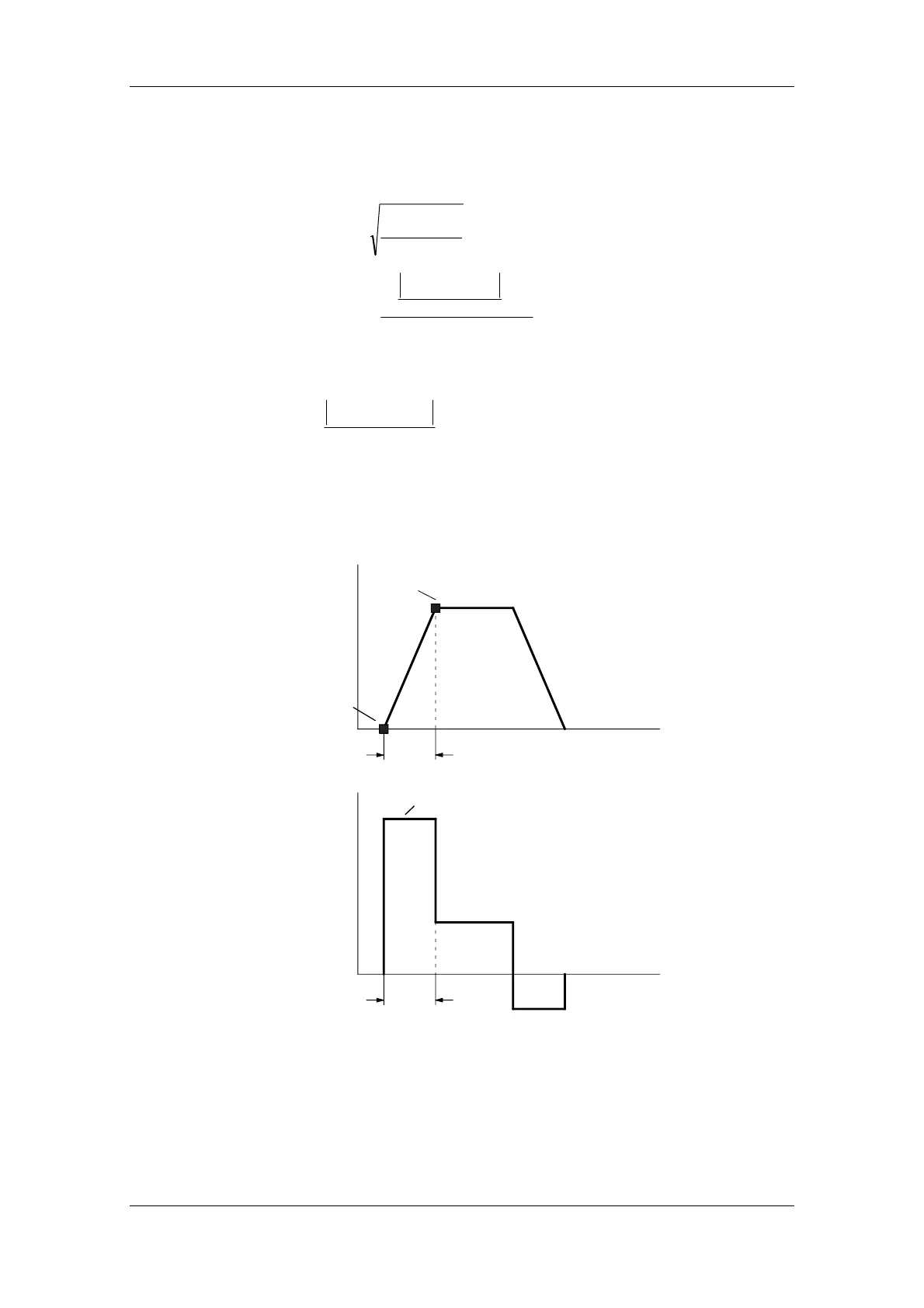
When calculating the mean motor speed, it must be borne in mind that
the initial value and the final value of the motor speed should not have
different signs. Thus, an interpolation point must exist for every zero
passage.
M
Mot
M
t
Mot i
t
i
∆
n
Mot E
Mot
n
Mot A
t
t
i
∆
Fig. 11-9 Example of motor speed and motor torque in a time segment
∆
t
i
If the rms torque at the mean motor speed is below the S1 curve and
the dynamic limits are being adhered to, the selected synchronous
servomotor can be used.
Synchronous
servomotors
 Loading...
Loading...









