Engineering Information 06.2005
6SE7087-6QX70 (Version AE) Siemens AG
11-16 Compendium Motion Control SIMOVERT MASTERDRIVES
In order to calculate the motor's rms current, the motor torque in all
parts of the travel curve must first be determined. The motor current is
thus calculated as follows:
II
M
M
I
I
k
I
I
k
Mot n
Mot
n
n
n
n
n
n
n
=⋅ ⋅− ⋅ + ⋅()(()) ()
2222
2
1
1
µµ
I
nµ
Rated magnetizing current
k
n
= 1 In the constant flux range
k
n
n
n
n
= In the field weakening range
The rms value of the motor current is calculated as follows:
I
II
t
T
eff
Mot A Mot E
i
=
+
⋅
∑
()
2
2
∆
II
Mot A Mot E
+
2
Mean motor current in time segment ∆ t
i
(A: initial value, E: final value)
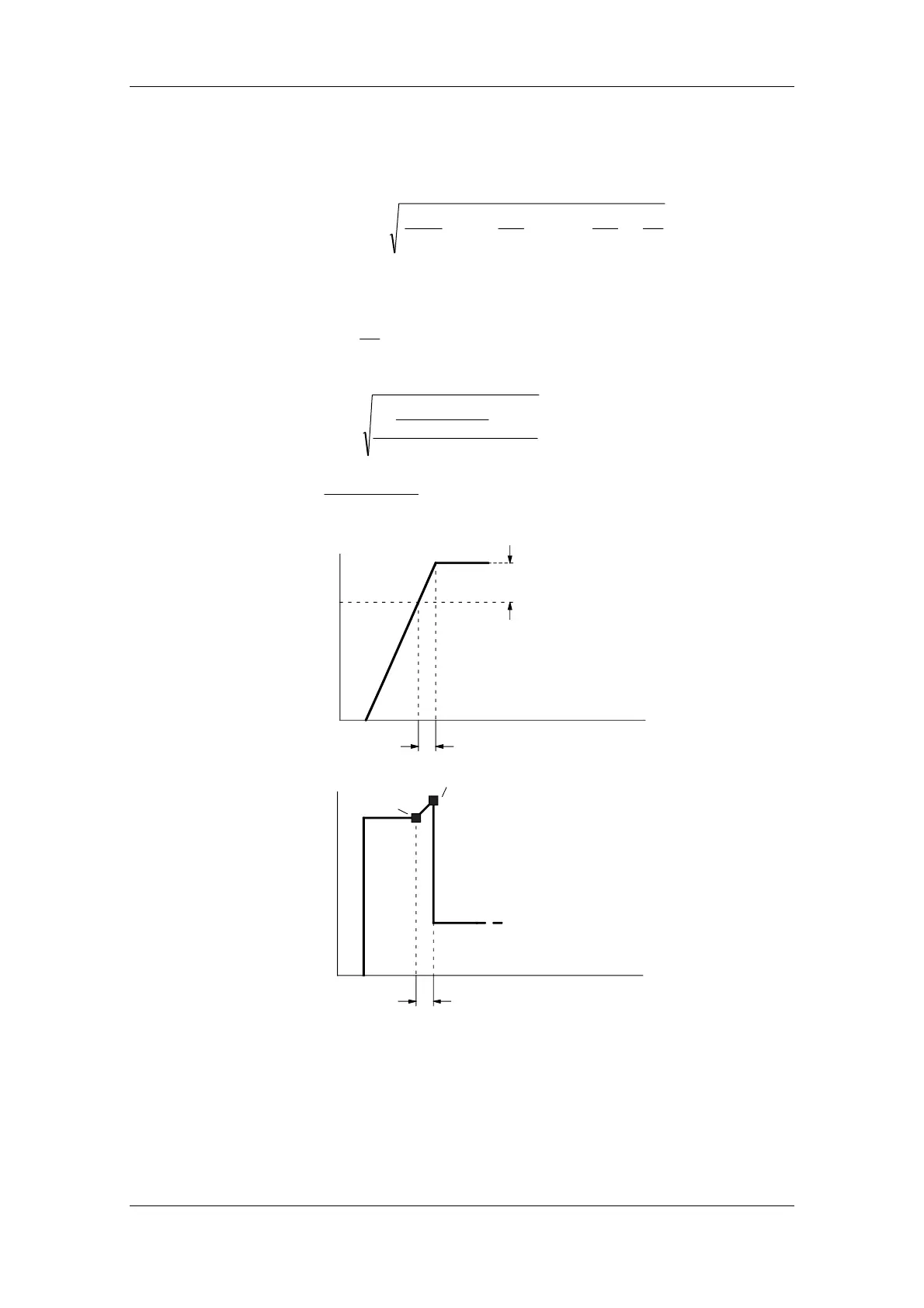
n
Mot
t
t
i
∆
Field weakening range
n
n
I
Mot
t
t
i
∆
Mot A
I
Mot E
I (Increase of the motor current in the field weakening
range)
Fig. 11-10 Example of motor speed and motor current in a time segment
∆
t
i
If the dynamic limits are being adhered to and the rms value of the
motor current is smaller than the motor's rated current, the selected
induction servomotor can be used.
Induction
servomotors
 Loading...
Loading...









