Function diagram
87654321
fp_mc_242_e.vsd
Encoder
MASTERDRIVES MC
14.10.10
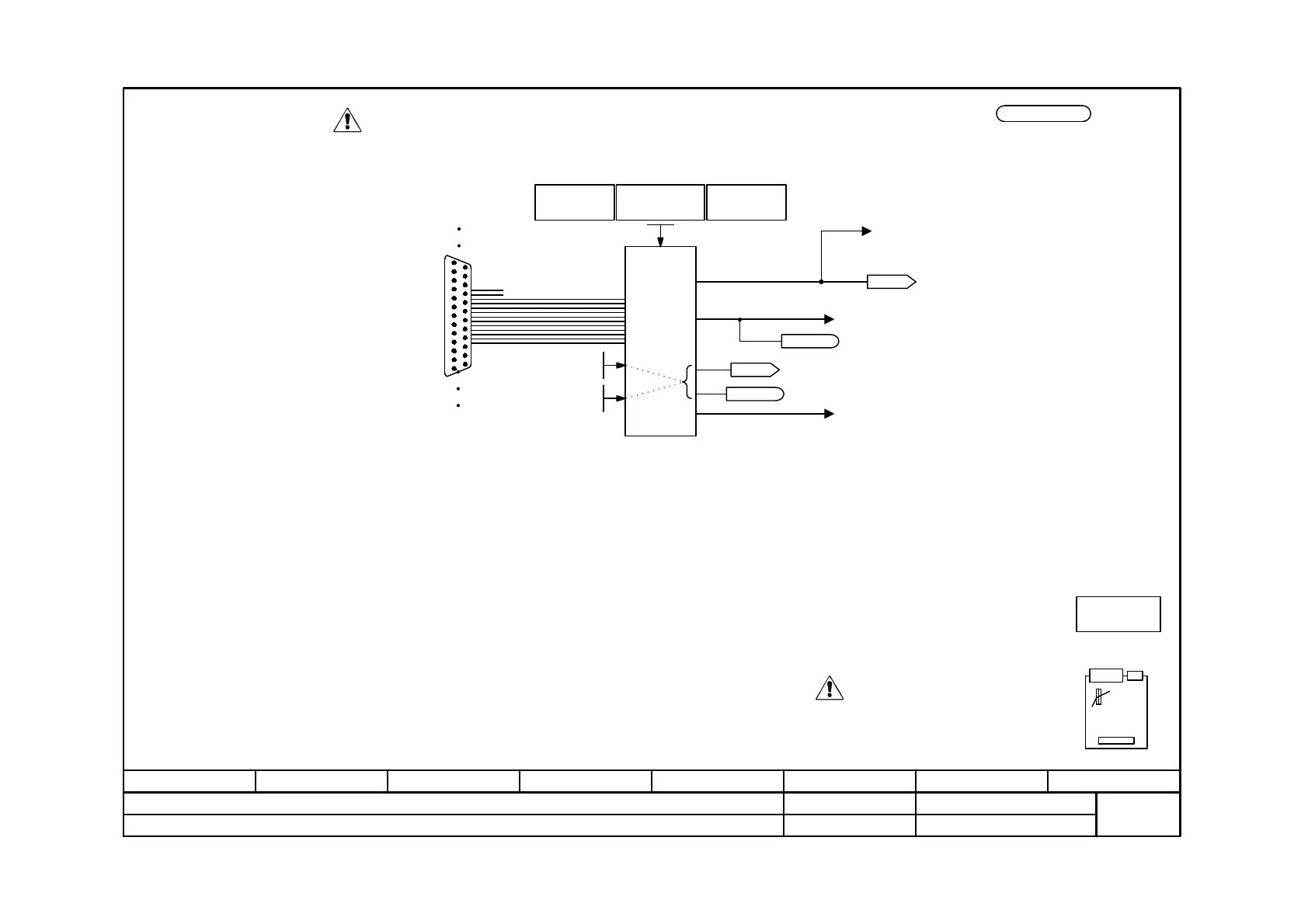
Encoder evaluation external encoder (SBM2 not in slot C and sin/cos encoder)
-242 -
V2.5
No evaluation of
motor temp.
Pin assignment -X424:
1 : P encoder
2 : M encoder
3:A+
4:A-
5 : Internal shield for 3+4
6:B+
7:B-
8 : Internal shield for 6+7
13 : +Temp
14 : Encoder sense
16 : 0 V Sense
17 : R+
18 : R-
19 : C+
20 : C-
21 : D+
22 : D-
24 : Internal shield for 13+25
25 : -Temp
Housing: external shield
-X424
Encoder
evaluation
F051 Encoder fault
P135 = 3/7
Current rotor position of external
machine encoder [335.1]
<1> Range of values = 0 ... 2
32
-1
for one encoder revolution
KK104 will be supported only
when using an external encoder
with incremental tracks (sine-/
cosine encoder).
<1>
Volts Enc SBM2
P145.02 (5)
Pulse ExtEncod
60 ... 16000
P137 (2048)
SBM (6SE7090-0XX84-0FD0)
2 hook switches for voltage supply
of the encoder on the board:
5 V : both switches open
7,5 V : S1 open, S2 closed
15 V : both switches closed
X424 X420
S2
S1
Volts Enc SBM2
P145.02 (5)
Fine resolution external encoder [335] (only SBM2)
If the external encoder is assigned to position detection
on the motor side (P182 = 104), parameterization of
the position detection on the motor side (actual value
evaluation factor IBF P169/P170, resolution P171, IBF
numerator/denominator P180 to FD330) is used for
calculating the zero offset in LU. Otherwise the
corresponding parameter of the external position
detection (actual value evaluation factor P152/P153,
resolution P154 , IBF numerator/denominator P180 to
FD335) is used for this purpose.
<2>
Encoder monitor
0000 ... 9999
P142.2 (0001)
<2>
Setting of P142.2:
xxx0 Position correction with zero pulse deactivated
xxx1 Position correction with zero pulse activated
SBM2 (6SE7090-0XX84-0FE0)
Setting of the supply voltage in volts via P145
(Maximum value of the output voltage:
in the case of Compact units: 15 V
in the case of Compact PLUS units: 19 V
independent of parameterization)
Position correction with zero pulse
The encoder connection may neither be closed nor removed when live!
The converter must be de-energized (24 V electronics power supply disconnected and DC link
fully discharged)!
KK0104
Theta(mech.)
B0071 MeasV valid
KK0088 Zero point offset external encoder in LU <2>
Act. val. evaluation.F.
IBF
Position resolution
B0073
Zero point offset external encoder detected
n959.36 = 6
 Loading...
Loading...









