Make correction to
ramp func. gen.
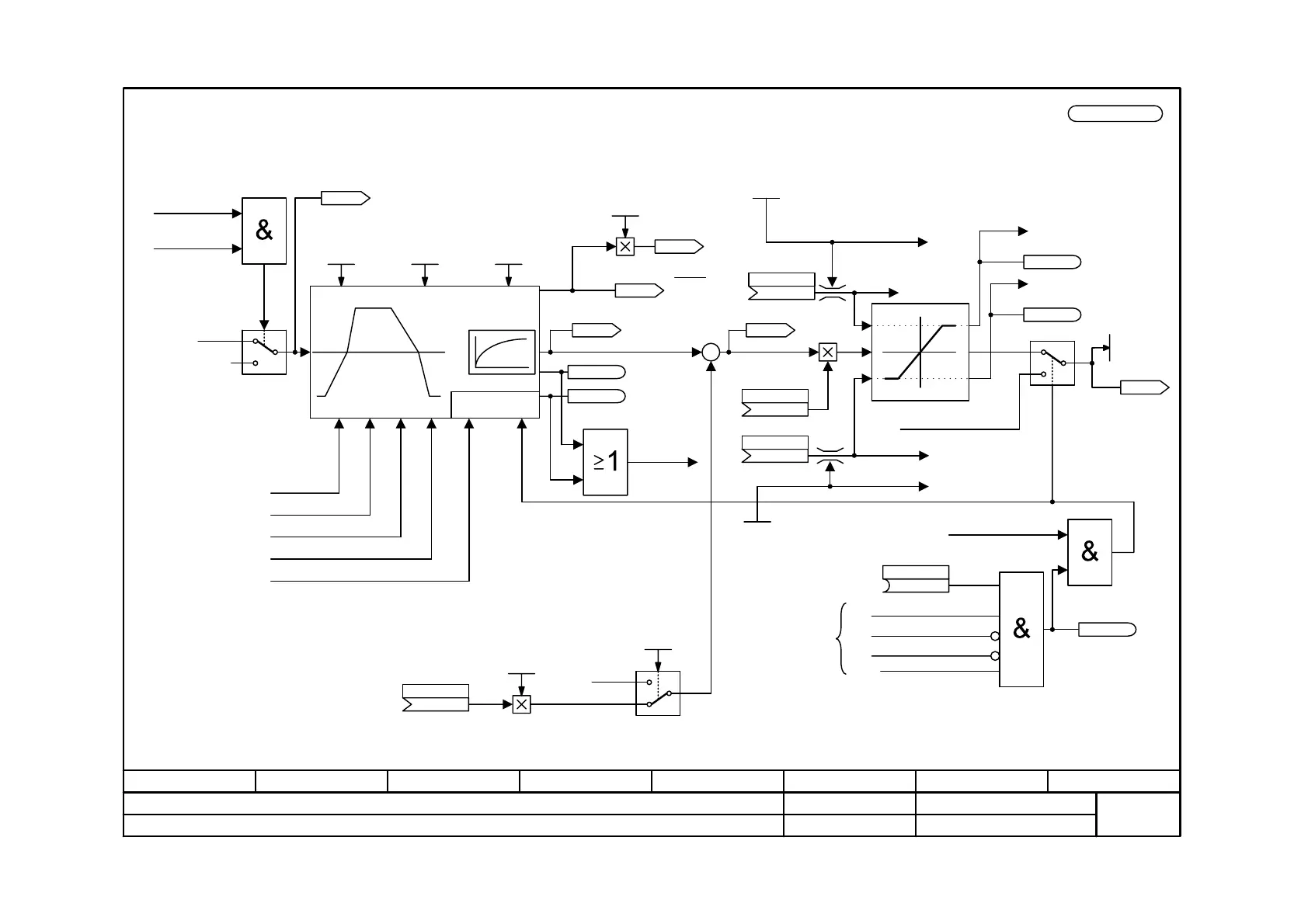
Function diagram
87654321
fp_mc_320_e.vsd
Setpoint processing
MASTERDRIVES MC
18.01.06
Ramp-function generator
-320 -
V2.5
0
1
[180.7]
Release setpoint
of control word 1
Drive status
OPERATION
0 %
n(set, spd sel)
from setpoint
processing 1
[310.8]
Ramp generator release of sequence control
1 = Release
0 = Set ramp generator output to 0
HLRgen active to
status word 1
[200.2]
[180.7] RampGen stop from control word 1
[320.8] Limitr FWS act.
[320.8] Limitr REV act.
0
1
0 %
x
y
+
+
[
100 %
ms
]
[320.2]
[320.2]
0
1
Position controller output [340.8]
Jog bit 0
Enable RGen bypass
from position control [340.5]
Setpoint enable
Jog bit 1
Enable speed control
From process
control
Ramp-function generator bypass
[500.5] Actual speed value (KK0091)
0 %
[360.4] [370.1]
[480.7]
0 %
[480.6]
[360.4] [370.1]
Accel Time
0.00 ... 600.00 s
P462.F (0.50)
KK
P438.B (0)
Src Add Setp 2
Scale Add Setp 2
-300.0 ... 300.0 %
P439.F (100.0)
KK0073
n(set, RGenOut)
B0204
Limitr REV act.
KK0074
n(set,sum2)
n(set,limitr)
r472
n959.43 = 2
SmoothRGenOut
0.000 ... 60.000 s
P469.F (0.000)
Decel Time
0.00 ... 600.00 s
P464.F (0.50)
B0201 Accel active
B0202 Decel active
No inching of
sequence control
n(max,FWDSpeed)
0.0 ... 200.0 %
P452.F (100.0)
n(max,REVSpeed)
-200.0 ... 0.0 %
P453.F (-100.0)
KK0076
dn/dt (RgenOut)
K0077
Torque(PRE)
Scale Torq(PRE)
0.0 ... 214748339 %
P471.F (100.0)
B0203
Limitr FWD act.
KK0075
n(set,limitr)
B
P772 (1)
SrcEnRGenByp
KK0072
n(set,RGen-I)
B0205
Enable position control
from HLG bypass
KK
P440 (1)
Src.Diameter factor
K
P454.2 (4)
Src. n(max,REVSpeed)
K
P454.1 (2)
Src.n(max,FWDSpeed)
 Loading...
Loading...









