[dwklatve-120124-01.tif, 1, en_US]
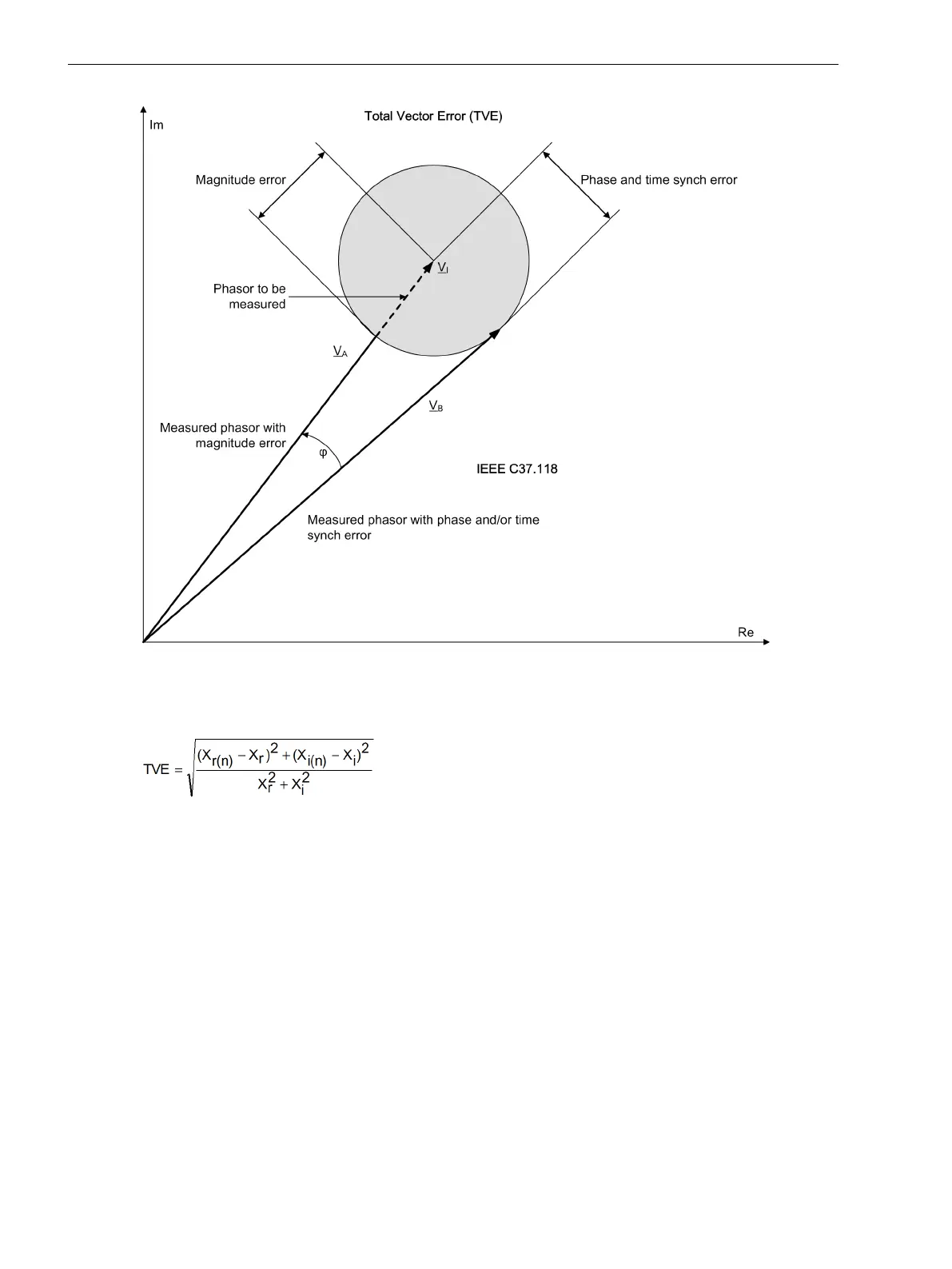
Figure 6-16
Representation of the Total Vector Error
The TVE is defined as follows:
[fo_utcphi-111011-01.tif, 1, --_--]
where:
•
X
r(n)
= Real part of measured signal
•
X
i(n)
= Imaginary part of measured signal
•
X
r
= Real part of input signal
•
X
i
= Imaginary part of input signal
Variables that influence the TVE are:
•
Amplitude errors
•
Phase errors
•
Synchronization accuracy (deviation from the UTC)
Synchronization accuracy is affected by a GPS timer and the precise correction of the time delay within the
GPS receiver module, as well as by the optimal setup of the GPS antenna.
Function-Group Types
6.4 Function-Group Type Phasor Measurement Unit (PMU)
156 SIPROTEC 5, Fault Recorder, Manual
C53000-G5040-C018-5, Edition 11.2017

 Loading...
Loading...










