Chapter 7
96
UM10350_PCNC770_Manual_0916A
Programming
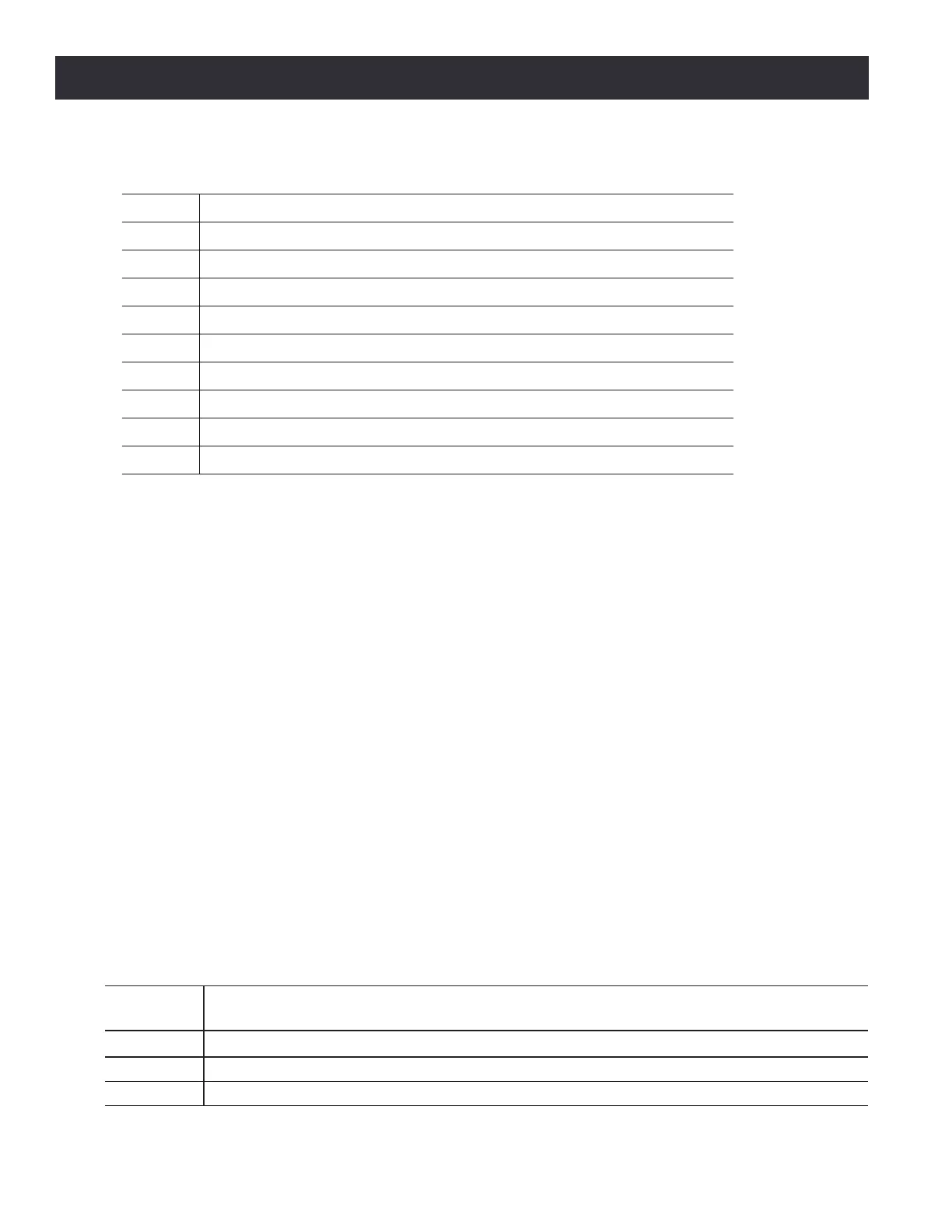
Order of Execution
Order Item
15 Cutter radius compensation on/off (G40, G41, G42)
16 Tool table offset on/off (G43, G49)
17 Fixture table select (G54 – G58 and G59 P~)
19 Set path control mode (G61, G61.1, G64)
19 Set distance mode (G90, G91)
20 Set canned cycle return level mode (G98, G99)
21 Home, change coordinate system data (G10) or set offsets (G92, G94)
22 Perform motion (G00 to G03, G12, G13, G80 to G89 as modied by G53)
23 Stop (M00, M01, M02, M30, M60)
7.4.3 Error Handling
This secon describes error handling in PathPilot. This operang system somemes ignores things it
does not understand. If a command does not work as expected or does nothing, check it was typed
correctly. The operang system does not check for excessively high machining feeds or speeds. Nor does
it detect situaons where a legal command does something unfortunate, such as machining a xture.
7.4.4 Modality and Modal Commands
G-codes and M-codes are, generally speaking, modal. Modal commands cause the machining
system to change from one mode to another. The mode stays acve unl another command changes
it implicitly or explicitly. For example, if coolant is turned on (M07 or M08) it stays on unl it is
explicitly turned o in the program (M09). A few G-codes and M-codes are non-modal. These codes
have eect only on the lines on which they occur. For example, dwell (G04) is non-modal.
7.4.5 Modal Groups
Modal commands are arranged in sets called modal groups, and only one member of a modal group
may be in force at any given me. In general, a modal group contains commands for which it is
logically impossible for two members to be in eect at the same me – for example inch units (G20)
vs. millimeter units (G21). A machining system may be in many modes at the same me, with one
mode from each modal group being in eect.
Modal Groups for G-codes
Group 1 =
{G00, G01, G02, G03, G33, G38.x, G73, G76, G80, G81, G82, G84, G85, G86, G87, G88, G89}
motion
Group 2 = {G17, G18, G19, G17.1, G17.2, G17.3} plane selection
Group 3 = {G90, G91} distance mode
Group 4 = {G90.1, G91.1} arc IJK distance mode
(...continued)
(connued on next page...)