476
DMOV K100000 D102
X10D115.0
X11
X12
X15
M100
DMOV K1000 D104
DMOV K10000 D100
M101
M102
X13D115.0
D115.4
DMOVP K0 D106
DMOVP K100000 D110
SET
M105
X14
DMOV K500000 D106
DMOV K100000 D110
SET
M104
D115.2
D115.3
ZRST M103 M111
M9000
M9000
MOV K4M100 D114
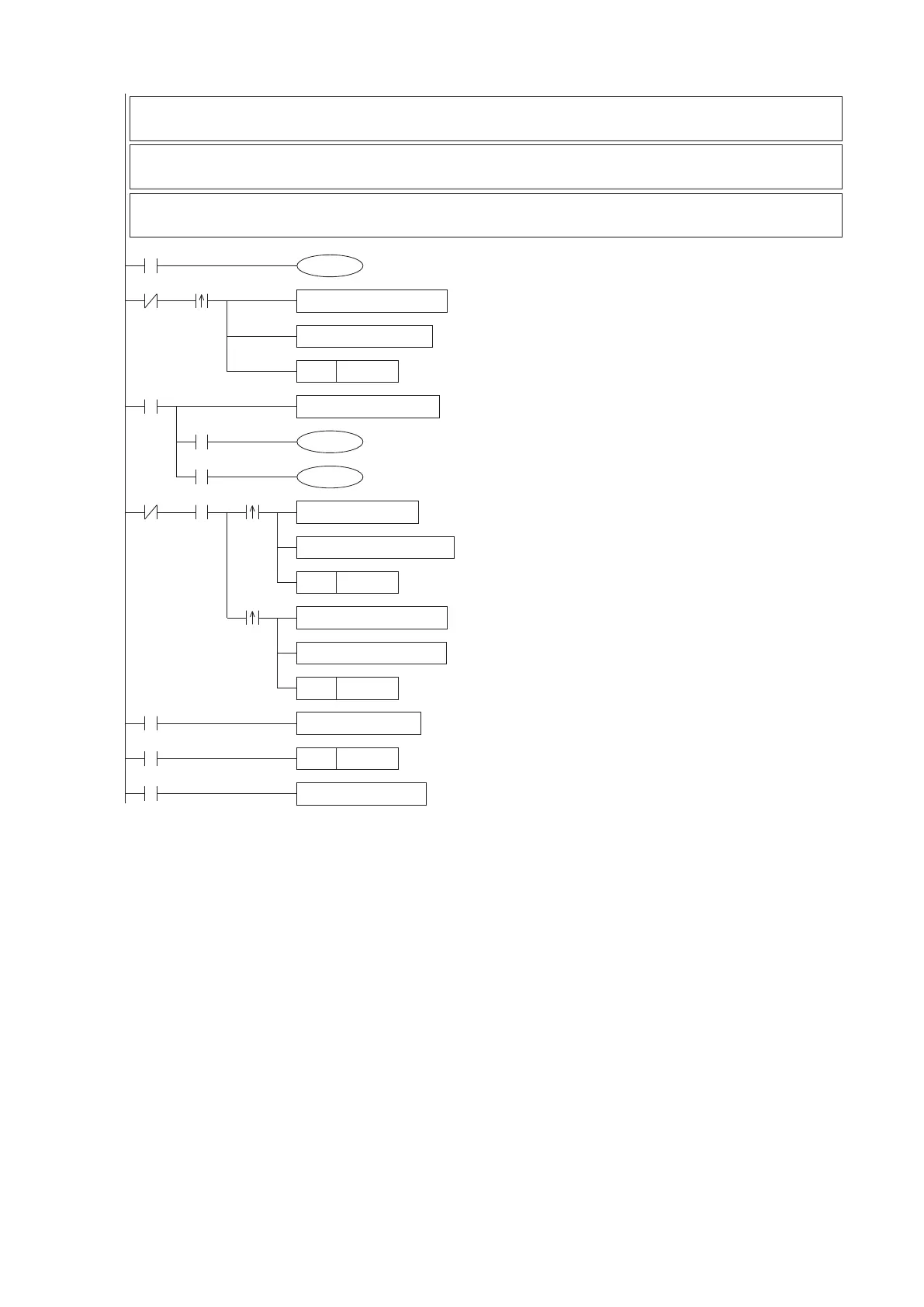
This brief positioning example is in the master Station No. 0 to control the #5 axis at the Station No. 1.
Force the #5 axis immediately stop
Set the ZRN speed for the #5 axis
Set the ZRN creep speed for the #5 axis
Set the JOG speed for the #5 axis
SET
M103
Trigger the #5 axis to perform the ZRN operation
Trigger the #5 axis to perform the JOG+ operation
Trigger the #5 axis to perform the JOG- operation
Set the target position for the absolute positioning at #5 axis
Set the operation speed for the absolute positioning at #5 axis
Trigger the #5 axis to perform the absolute positioning
Set the target position for the relative positioning at #5 axis
Set the operation speed for the relative positioning at #5 axis
Trigger the #5 axis to perform the relative positioning
To clear all the #5 axis's function trigger contacts when one of those
is nished
Transfer the trigger commands from the master Station No. 0 to the
Station No. 1 for the #5 axis's positioning function contacts
SET
Y14
The #5 axis's positioning function has been stopped abnormally
#5 axis uses D100~119
DD100=JOG spd; DD102=ZRN spd; DD104=ZRN creep spd; DD106=Target#1; DD108=Target#2;
DD110=Spd#1; DD112=Spd#2; D114=Command; D115=Status; DD116=Current spd; DD118=Current location
D115 delivers the operation status of #5
b0=READY/BUSY ag; b1=Pulse output status ag; b2=Positioning completed ag;
b3=Positioning abnormal stop ag; b4=Zero home positioning had been completed
D114 transfers the operation command for the #5 positioning
b0=STOP; b1=JOGF; b2=JOGR; b3=ZRN; b4=DRVR; b5=DRVA; b6=DV2R; b7=DV2A;
b8=DVIT; b9=DV2I; b10=DVSR; b11=DVSA; b12=PLSV