475
Section 3: To edit the related program and setting at the master Station No. 0.
Create the communication table “CPUL0” for the CPU LINK and add the CPUL instruction into the program
of the master Station No. 0, thus the station No. 0 and No. 1 will transfer the related data to each other
automatically.
M9000
CPUL CPUL0 D0 K1
CLR
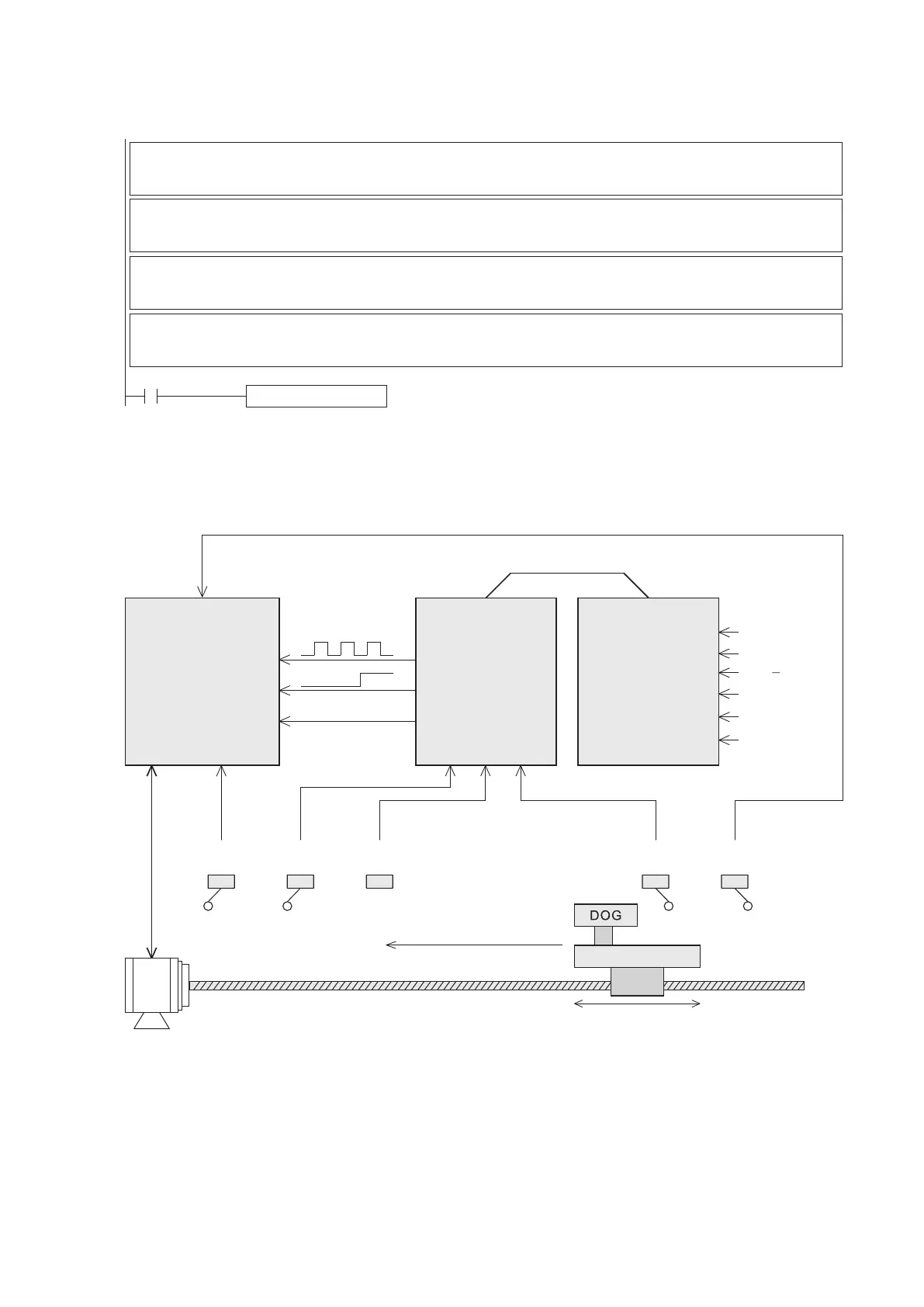
CP1( Station No. 1)
VSM-32MT
X10
X0X11
X14
X15
X12
X13
X11
X10
CP1( Station No.0)
VSM-32MT
CPU LINK
Pulse output Y0
Direction output Y4
Clear signal Y10
Servo motor drive
Home position
return
Stop
Single-speed
positioning
Move back to
zero point
JOG+
JOG
#5 axis uses D100~119
DD100=JOG spd; DD102=ZRN spd; DD104=ZRN creep spd; DD106=Target#1; DD108=Target#2
DD110=Spd#1; DD112=Spd#2; D114=Command; D115=Status; DD116=Current spd; DD118=Current location
#6 axis uses D120~139
DD120=JOG spd; DD122=ZRN spd; DD124=ZRN creep spd; DD126=Target#1; DD128=Target#2
DD130=Spd#1; DD132=Spd#2; D134=Command; D135=Status; DD136=Current spd; DD138=Current location
#7 axis uses D140~159
DD140=JOG spd; DD142=ZRN spd; DD144=ZRN creep spd; DD146=Target#1; DD148=Target#2
DD150=Spd#1; DD152=Spd#2; D154=Command; D155=Status; DD156=Current spd; DD158=Current location
#8 axis uses D160~179
DD160=JOG spd; DD162=ZRN spd; DD164=ZRN creep spd; DD166=Target#1; DD168=Target#2
DD170=Spd#1; DD172=Spd#2; D174=Command; D175=Status; DD176=Current spd; DD178=Current location
Next, edit the control program for the #5 axis. The following example program carries out the home position return,
forward JOG, reverse JOG and single-speed positioning functions.
User can try to edit a complex positioning program for study and test, also can use the same shape to add up control
program for the #6~#8 axes.
The brief diagram of the #5 axes is shown below.
LSR
Reverse limit
switch
LSN
Reverse limit
switch
DOG
Near point
signal
LSF
Forward limit
switch
LSP
Forward limit
switch
Servo
motor
Direction of home positioning
Sliding table
Driving screw