104 CHA NGE PARA METERS
Or 2) Re-burden the unit using the 50 %/100 % burden jumper on the pow er board. See 13.13.4 DRIVE
PERSONALITY / Armature current burden resistance PIN 680.
There are 2 stages to the autotune function.
Stage 1. The current automatically increases positively until it becomes continuous.
Stage 2. The current is automatical ly perturbated until the response is optimised.
When it has finished it drops out the main contactor, sets the required parameters, and then automatically
DISABLES itself. You can check that it has finished by looking in the display window and w aiting for the
DISABLED comment to re-appear on the bottom line. You must then save the parameters using the
PARA METER SA VE menu.
If the routine is interrupted by a power loss or alarm then the routine is aborted and the old parameter values
are left intact.
In the case where the motor has a short time constant, the armature current may remain discontinuous, even
at currents in excess of 100 %. There are 2 possible outcomes.
1) The autotune will find that the current never goes continuous up to 150% in stage 1. Stage 2 is
abandoned. The autotune automatically sets the follo wing parameters.
93)C UR PROP G AIN is set to 1.00. 94)C UR INT G AIN is set to 7.00.
95)C URRENT DISCONTINUITY is set to 0.00 %.
2) The autotune will find that the current goes continuous at a high level in stage 1. During stage 2 the
induced perturbations cause a current overload to occur. Then the routine is aborted and the old parameter
values are left intact. In this case it is suggested that the follo wing parameters are set manually:
93)C UR PROP G AIN is set to 1.00. 94)C UR INT G AIN is set to 7.00.
95)C URRENT DISCONTINUITY is set to 0.00 %.
This is a good starting point although the current loop response may be slow when the armature current is
high, (above the discontinuous current point).
Note. There is a hidden PIN w hich contains 707)AUTOTUNE M ONITOR flag (High for start).
6.8.10 CURRENT C ON TROL / Current amp proportional gain PIN 93
This can be set by usi ng the AUTOTUNE function. Increase to improve response, too much may cause
instability. If you change your supply voltage, current calibration or motor type then re-adjust this parameter.
6.8.11 CURRENT C ONTROL / Current amp integral gain PIN 94
This can be set by usi ng the AUTOTUNE function. Generally an increased integral gain will improve the
response. If you change your supply voltage, current calibration or motor type then re-adjust this parameter.
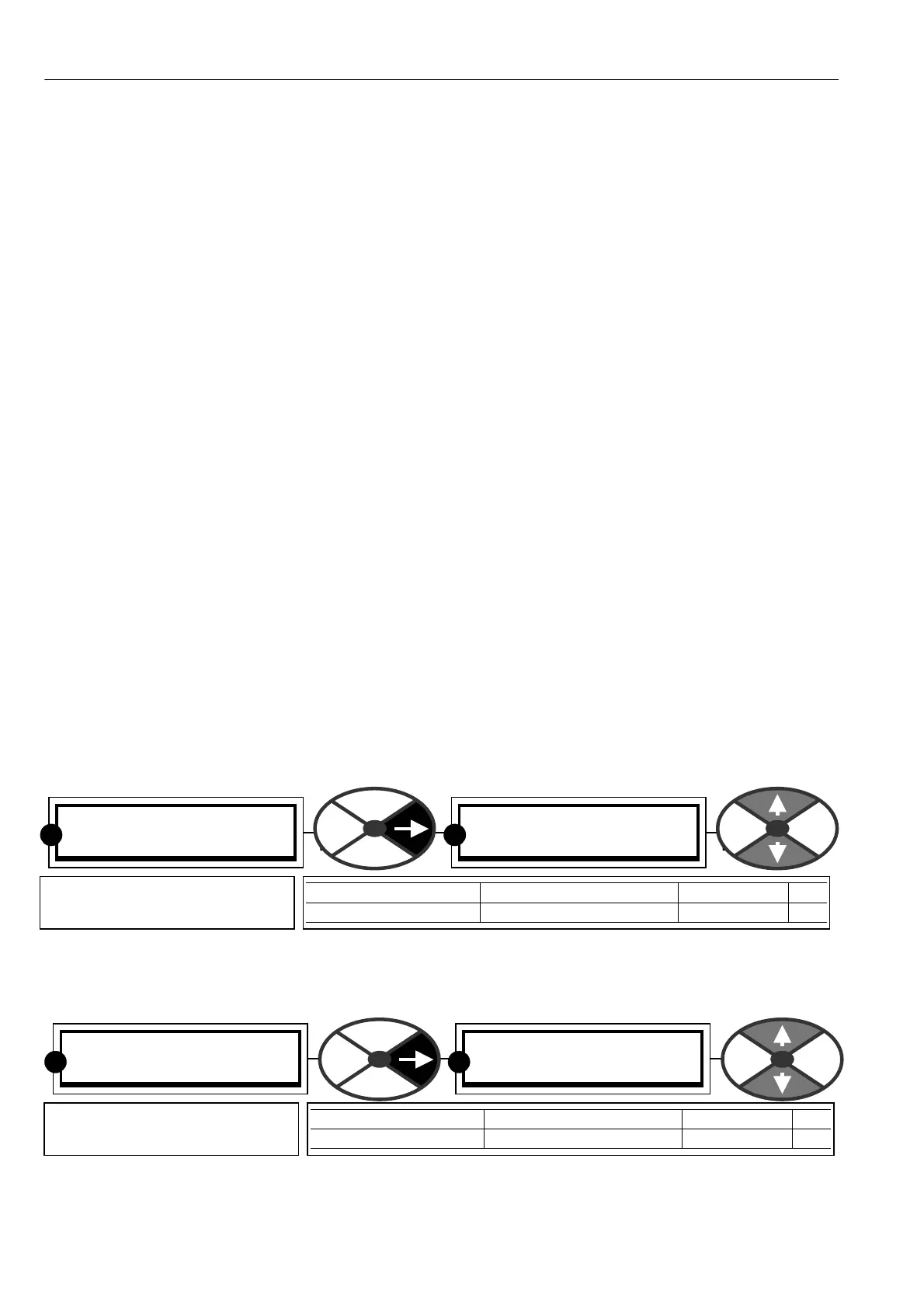
CURRENT C ON TROL 3
93)C UR PROP GAIN
93)C UR PROP GAIN
30.00
PARA METER RANGE DEF AULT PIN
CUR PROP G AIN 0.00 to 200.00 30.00 93
Sets the proportional gain of
the current error amplifier.
R
R
CURRENT C ON TROL 3
94)C UR INT GAIN
94)C UR INT GAIN
3.00
PARA METER RANGE DEF AULT PIN
CUR INT G AIN 0.00 to 200.00 3.00 94
Sets the integral gain of the
current error amplifier.
R R